#include <srs_env_model/but_server/server_tools.h>#include <srs_env_model/OctomapUpdates.h>#include <pcl/registration/icp.h>#include <pcl/registration/ia_ransac.h>#include <pcl/registration/icp_nl.h>#include "pcl_registration_module.hpp"
Include dependency graph for pcl_registration_module.h:

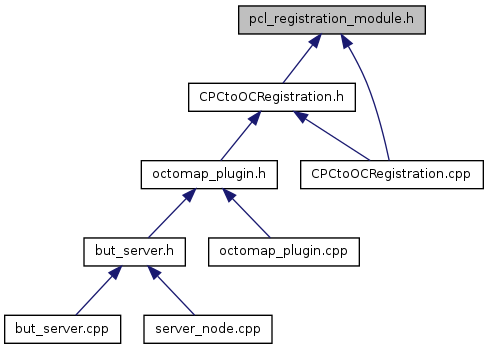
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | srs_env_model::CPclRegistration< PointSource, PointTarget, Scalar > |
Namespaces | |
| namespace | srs_env_model |
Enumerations | |
| enum | EPclRegistrationMode { srs_env_model::PCL_REGISTRATION_MODE_NONE = 0, srs_env_model::PCL_REGISTRATION_MODE_ICP = 1, srs_env_model::PCL_REGISTRATION_MODE_ICPNL = 2, srs_env_model::PCL_REGISTRATION_MODE_SCA = 3 } |