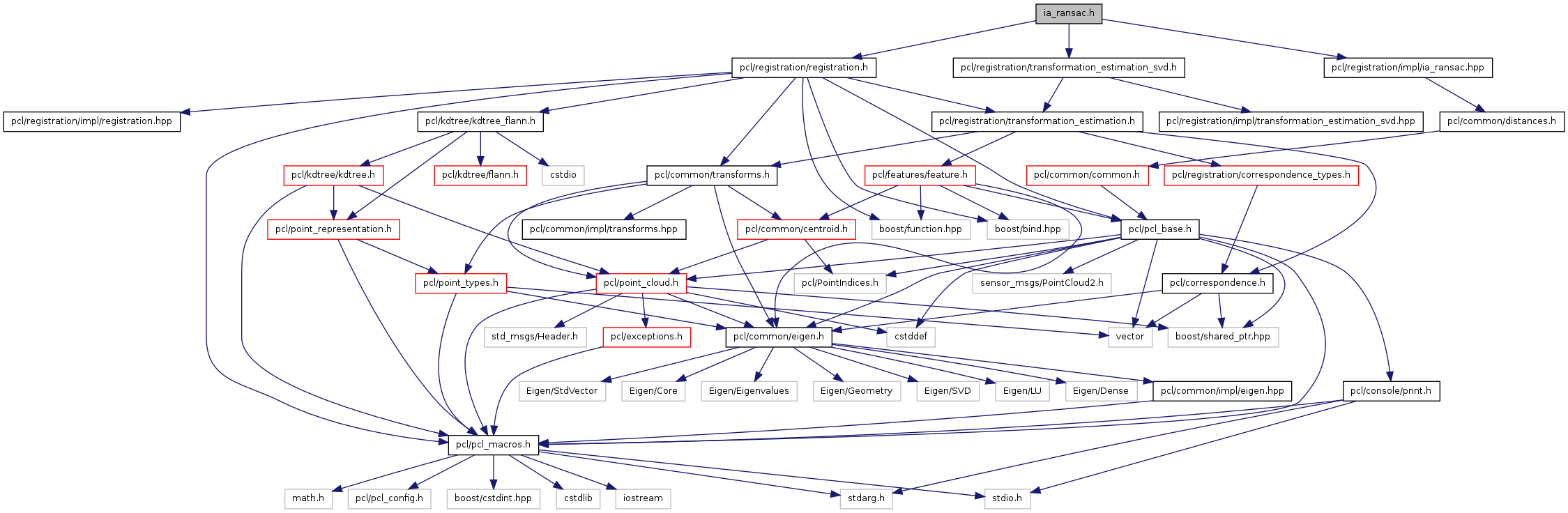
#include <pcl/registration/registration.h>#include <pcl/registration/transformation_estimation_svd.h>#include <pcl/registration/impl/ia_ransac.hpp>
Include dependency graph for ia_ransac.h:
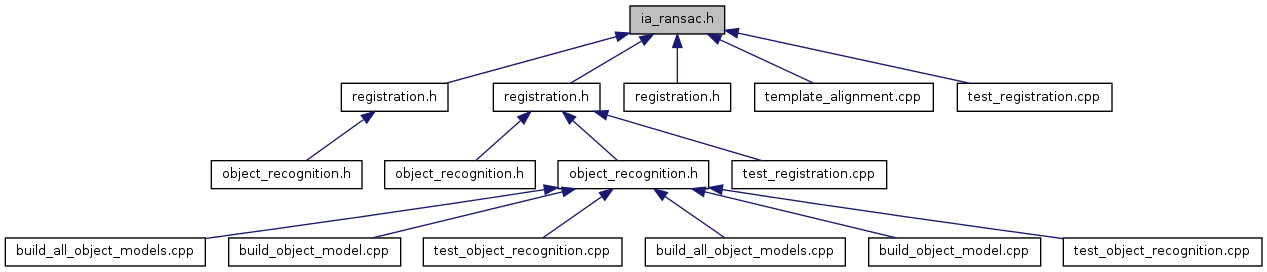
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::ErrorFunctor |
| class | pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::HuberPenalty |
| class | pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT > |
| SampleConsensusInitialAlignment is an implementation of the initial alignment algorithm described in section IV of "Fast Point Feature Histograms (FPFH) for 3D Registration," Rusu et al. More... | |
| class | pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::TruncatedError |
Namespaces | |
| namespace | pcl |