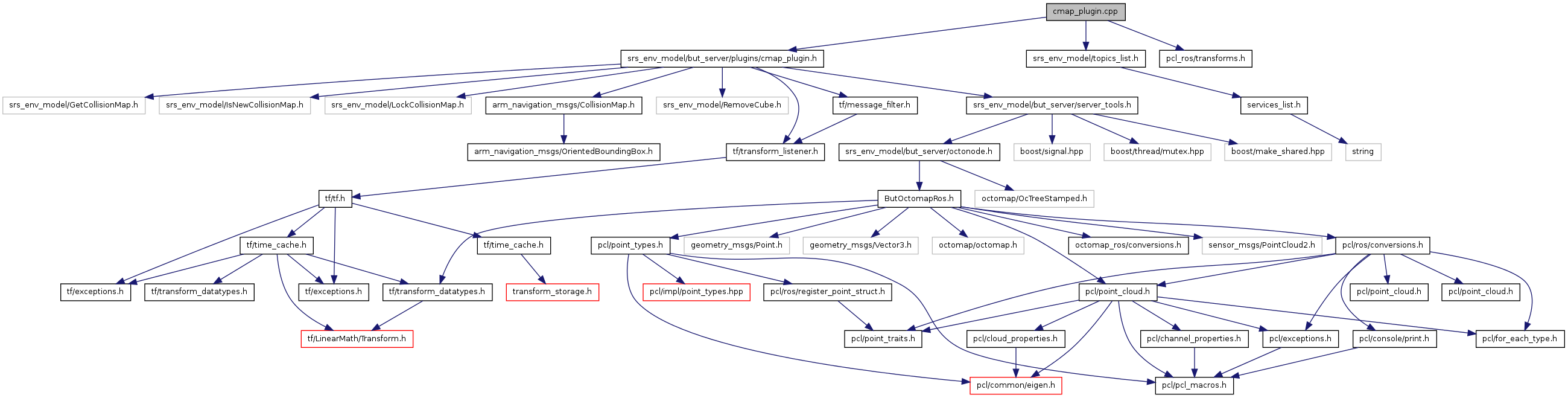
#include <srs_env_model/but_server/plugins/cmap_plugin.h>#include <srs_env_model/topics_list.h>#include <pcl_ros/transforms.h>
Include dependency graph for cmap_plugin.cpp:
Go to the source code of this file.
Defines | |
| #define | FIXED_FRAME "/map" |
| #define | POINT_ABS(p0, p1) {p0.x = abs(p1.x); p0.y = abs(p1.y); p0.z = abs(p1.z); } |
| #define | POINT_ADD(p0, p1, p2) {p0.x = p1.x + p2.x; p0.y = p1.y + p2.y; p0.z = p1.z + p2.z;} |
| #define | POINT_SUB(p0, p1, p2) {p0.x = p1.x - p2.x; p0.y = p1.y - p2.y; p0.z = p1.z - p2.z;} |
Define Documentation
| #define FIXED_FRAME "/map" |
Definition at line 33 of file cmap_plugin.cpp.
Definition at line 425 of file cmap_plugin.cpp.
Definition at line 423 of file cmap_plugin.cpp.