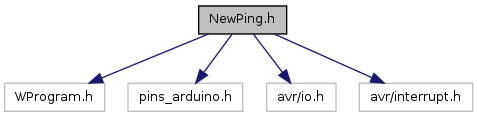
#include <WProgram.h>#include <pins_arduino.h>#include <avr/io.h>#include <avr/interrupt.h>
Include dependency graph for NewPing.h:
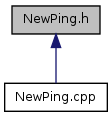
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | NewPing |
Defines | |
| #define | DISABLE_ONE_PIN false |
| #define | ECHO_TIMER_FREQ 24 |
| #define | MAX_SENSOR_DELAY 18000 |
| #define | MAX_SENSOR_DISTANCE 500 |
| #define | NewPingConvert(echoTime, conversionFactor) (max((echoTime + conversionFactor / 2) / conversionFactor, (echoTime ? 1 : 0))) |
| #define | NO_ECHO 0 |
| #define | PING_MEDIAN_DELAY 29 |
| #define | US_ROUNDTRIP_CM 57 |
| #define | US_ROUNDTRIP_IN 146 |
Define Documentation
| #define DISABLE_ONE_PIN false |
| #define ECHO_TIMER_FREQ 24 |
| #define MAX_SENSOR_DELAY 18000 |
| #define MAX_SENSOR_DISTANCE 500 |
| #define NewPingConvert | ( | echoTime, | |
| conversionFactor | |||
| ) | (max((echoTime + conversionFactor / 2) / conversionFactor, (echoTime ? 1 : 0))) |
| #define PING_MEDIAN_DELAY 29 |
| #define US_ROUNDTRIP_CM 57 |
| #define US_ROUNDTRIP_IN 146 |