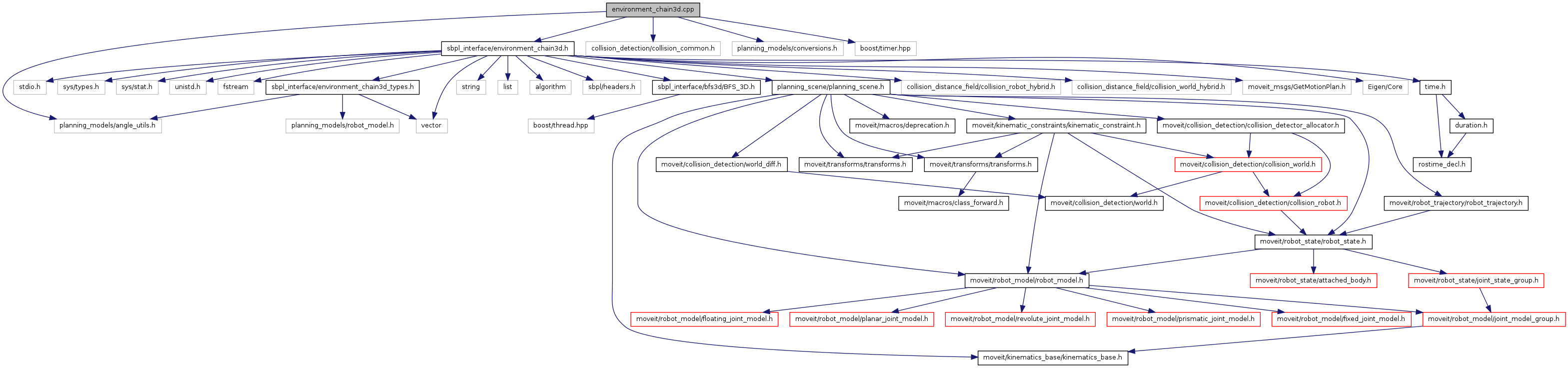
#include <sbpl_interface/environment_chain3d.h>#include <collision_detection/collision_common.h>#include <planning_models/conversions.h>#include <boost/timer.hpp>#include <planning_models/angle_utils.h>
Include dependency graph for environment_chain3d.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | sbpl_interface |
Variables | |
| static const unsigned int | DEBUG_OVER = 1 |
| static const double | JOINT_DIST_MULT = 1000.0 |
| static const unsigned int | PRINT_HEURISTIC_UNDER = 1 |
Variable Documentation
const unsigned int DEBUG_OVER = 1 [static] |
Definition at line 37 of file environment_chain3d.cpp.
const double JOINT_DIST_MULT = 1000.0 [static] |
Definition at line 40 of file environment_chain3d.cpp.
const unsigned int PRINT_HEURISTIC_UNDER = 1 [static] |
Definition at line 38 of file environment_chain3d.cpp.