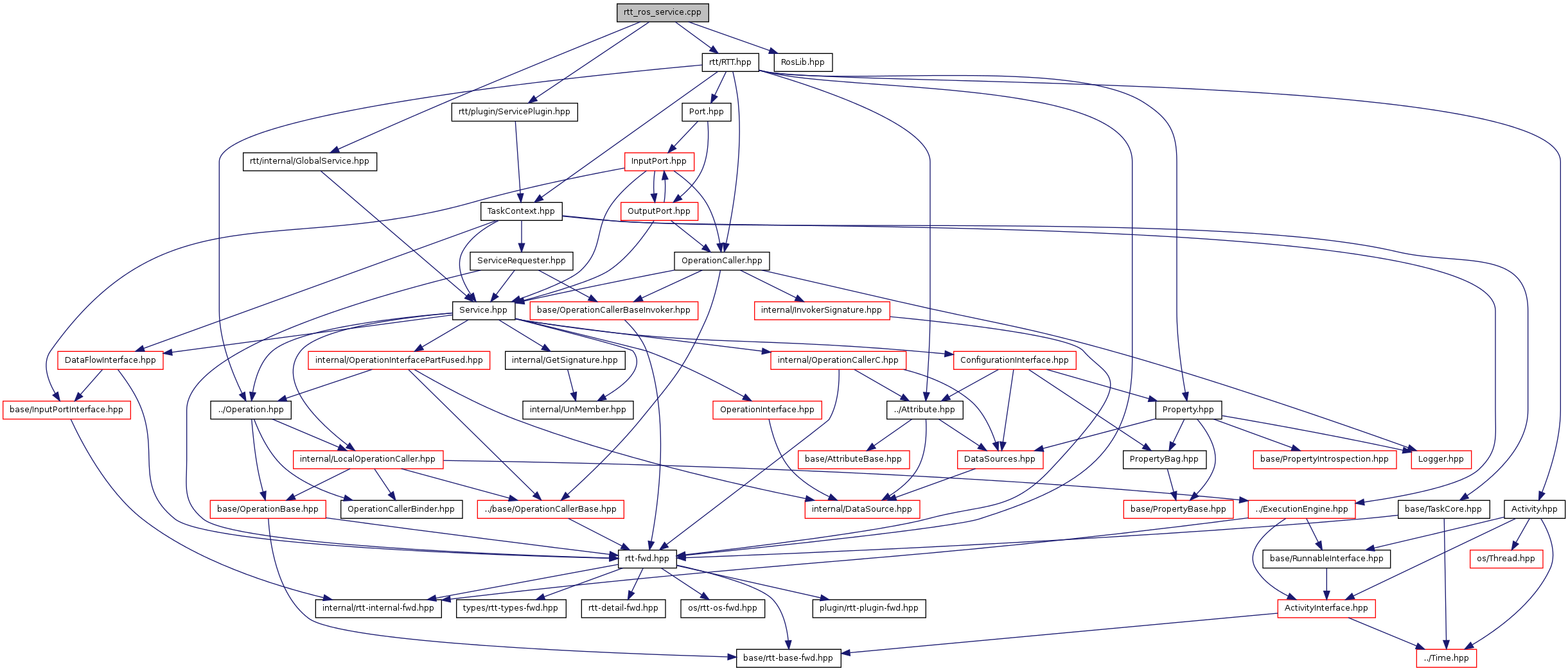
#include <rtt/RTT.hpp>#include <rtt/plugin/ServicePlugin.hpp>#include <rtt/internal/GlobalService.hpp>#include <RosLib.hpp>
Include dependency graph for rtt_ros_service.cpp:
Go to the source code of this file.
Classes | |
| class | ROSService |
Functions | |
| void | loadROSService () |
Function Documentation
| void loadROSService | ( | ) |
Definition at line 68 of file rtt_ros_service.cpp.