#include "ros/ros.h"
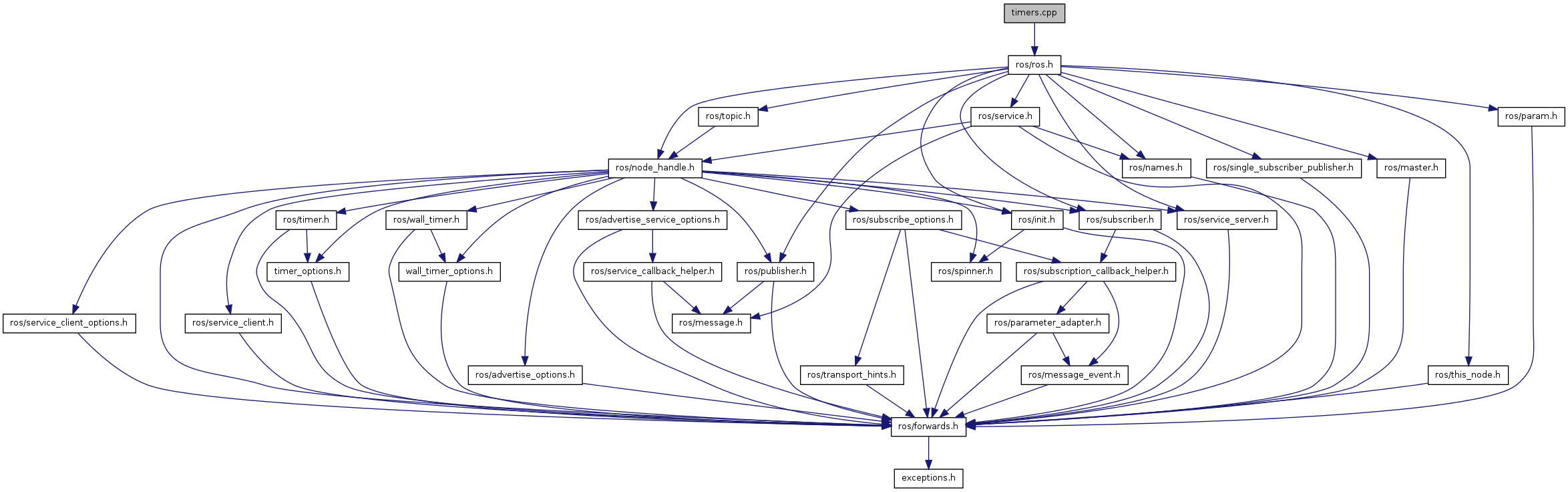
Include dependency graph for timers.cpp:
Go to the source code of this file.
Functions | |
| void | callback1 (const ros::TimerEvent &) |
| void | callback2 (const ros::TimerEvent &) |
| int | main (int argc, char **argv) |
Function Documentation
| void callback1 | ( | const ros::TimerEvent & | ) |
This tutorial demonstrates the use of timer callbacks.
Definition at line 35 of file timers.cpp.
| void callback2 | ( | const ros::TimerEvent & | ) |
Definition at line 40 of file timers.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Timers allow you to get a callback at a specified rate. Here we create two timers at different rates as a demonstration.
Definition at line 45 of file timers.cpp.