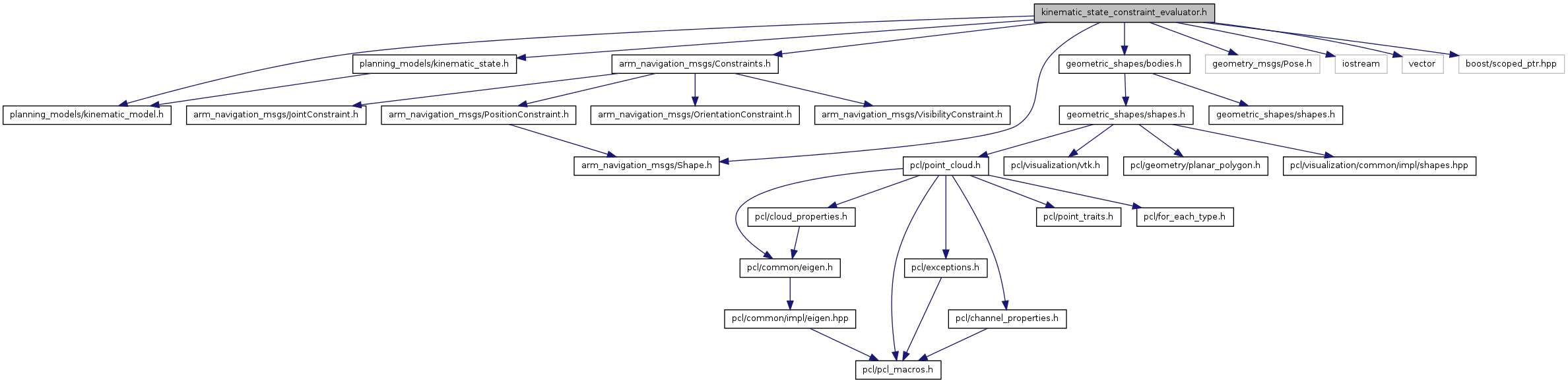
#include <planning_models/kinematic_model.h>#include <planning_models/kinematic_state.h>#include <arm_navigation_msgs/Constraints.h>#include <arm_navigation_msgs/Shape.h>#include <geometric_shapes/bodies.h>#include <geometry_msgs/Pose.h>#include <iostream>#include <vector>#include <boost/scoped_ptr.hpp>
Include dependency graph for kinematic_state_constraint_evaluator.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | planning_environment::JointConstraintEvaluator |
| class | planning_environment::KinematicConstraintEvaluator |
| class | planning_environment::KinematicConstraintEvaluatorSet |
| class | planning_environment::OrientationConstraintEvaluator |
| class | planning_environment::PositionConstraintEvaluator |
| class | planning_environment::VisibilityConstraintEvaluator |
Namespaces | |
| namespace | planning_environment |
Functions | |
| bool | planning_environment::createConstraintRegionFromMsg (const arm_navigation_msgs::Shape &constraint_region_shape, const geometry_msgs::Pose &constraint_region_pose, boost::scoped_ptr< bodies::Body > &body) |