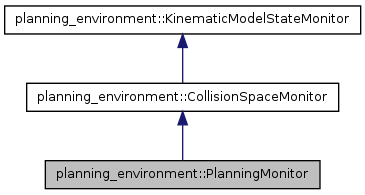
PlanningMonitor is a class which in addition to being aware of a robot model, and the collision model is also aware of constraints and can check the validity of states and paths. More...
#include <planning_monitor.h>
Public Member Functions | |
| void | getAllFixedFrameTransforms (std::vector< geometry_msgs::TransformStamped > &transform_vec) const |
| bool | getCompletePlanningScene (const arm_navigation_msgs::PlanningScene &planning_diff, const arm_navigation_msgs::OrderedCollisionOperations &ordered_collision_operations, arm_navigation_msgs::PlanningScene &planning_scene) const |
| PlanningMonitor (CollisionModels *cm, tf::TransformListener *tf) | |
| virtual | ~PlanningMonitor (void) |
Protected Member Functions | |
| void | loadParams (void) |
| Load ROS parameters. | |
Protected Attributes | |
| double | intervalCollisionMap_ |
| double | intervalPose_ |
| double | intervalState_ |
Detailed Description
PlanningMonitor is a class which in addition to being aware of a robot model, and the collision model is also aware of constraints and can check the validity of states and paths.
Definition at line 53 of file planning_monitor.h.
Constructor & Destructor Documentation
| planning_environment::PlanningMonitor::PlanningMonitor | ( | CollisionModels * | cm, |
| tf::TransformListener * | tf | ||
| ) | [inline] |
Definition at line 57 of file planning_monitor.h.
| virtual planning_environment::PlanningMonitor::~PlanningMonitor | ( | void | ) | [inline, virtual] |
Definition at line 63 of file planning_monitor.h.
Member Function Documentation
| void planning_environment::PlanningMonitor::getAllFixedFrameTransforms | ( | std::vector< geometry_msgs::TransformStamped > & | transform_vec | ) | const |
Definition at line 255 of file planning_monitor.cpp.
| bool planning_environment::PlanningMonitor::getCompletePlanningScene | ( | const arm_navigation_msgs::PlanningScene & | planning_diff, |
| const arm_navigation_msgs::OrderedCollisionOperations & | ordered_collision_operations, | ||
| arm_navigation_msgs::PlanningScene & | planning_scene | ||
| ) | const |
Definition at line 47 of file planning_monitor.cpp.
| void planning_environment::PlanningMonitor::loadParams | ( | void | ) | [protected] |
Load ROS parameters.
Definition at line 43 of file planning_monitor.cpp.
Member Data Documentation
double planning_environment::PlanningMonitor::intervalCollisionMap_ [protected] |
Definition at line 78 of file planning_monitor.h.
double planning_environment::PlanningMonitor::intervalPose_ [protected] |
Definition at line 80 of file planning_monitor.h.
double planning_environment::PlanningMonitor::intervalState_ [protected] |
Definition at line 79 of file planning_monitor.h.
The documentation for this class was generated from the following files: