#include <gtest/gtest.h>#include <pcl/point_cloud.h>#include <pcl/features/normal_3d_omp.h>#include <pcl/io/pcd_io.h>#include <pcl/features/shot.h>#include <pcl/features/shot_omp.h>#include <pcl/features/3dsc.h>#include <pcl/features/usc.h>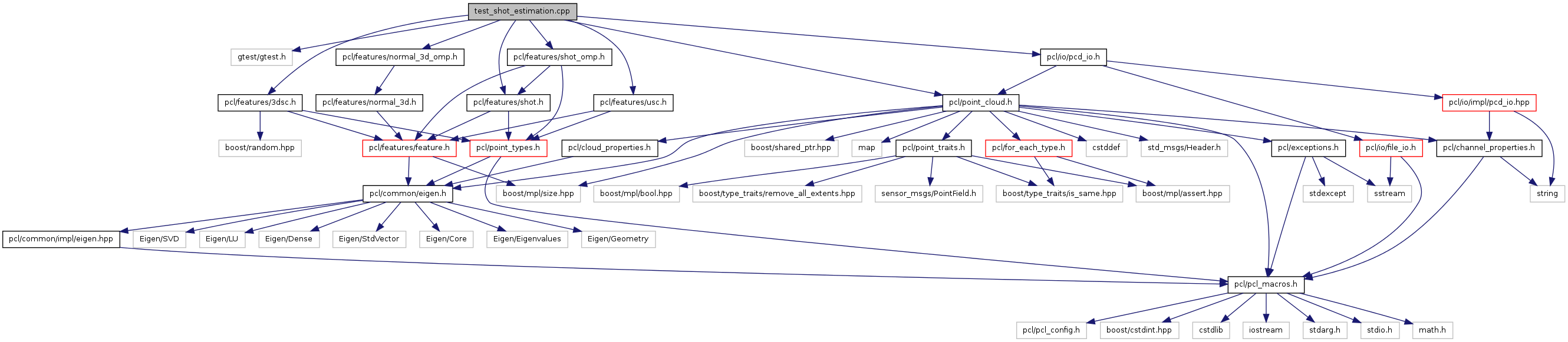
Go to the source code of this file.
Typedefs | |
| typedef search::KdTree < PointXYZ >::Ptr | KdTreePtr |
Functions | |
| template<typename FeatureEstimation , typename PointT , typename NormalT , typename OutputT > | |
| FeatureEstimation | createSHOTDesc (const typename PointCloud< NormalT >::Ptr &normals, const int nr_shape_bins=10, const int=30, const bool=true, const bool=false) |
| template<typename FeatureEstimation , typename NormalT , typename OutputT > | |
| FeatureEstimation | createSHOTDesc (const typename PointCloud< NormalT >::Ptr &normals, const int nr_shape_bins=10, const int nr_color_bins=30, const bool describe_shape=true, const bool describe_color=false) |
| template<> | |
| ShapeContext3DEstimation < PointXYZ, Normal, SHOT > | createSHOTDesc< ShapeContext3DEstimation< PointXYZ, Normal, SHOT >, PointXYZ, Normal, SHOT > (const PointCloud< Normal >::Ptr &normals, const int, const int, const bool, const bool) |
| template<> | |
| UniqueShapeContext< PointXYZ, SHOT > | createSHOTDesc< UniqueShapeContext< PointXYZ, SHOT >, PointXYZ, Normal, SHOT > (const PointCloud< Normal >::Ptr &, const int, const int, const bool, const bool) |
| int | main (int argc, char **argv) |
| void | shotCopyPointCloud (const PointCloud< SHOT > &cloud_in, const std::vector< int > &indices, PointCloud< SHOT > &cloud_out) |
| TEST (PCL, SHOTShapeEstimation) | |
| TEST (PCL, GenericSHOTShapeEstimation) | |
| TEST (PCL, SHOTShapeAndColorEstimation) | |
| TEST (PCL, SHOTShapeEstimationOpenMP) | |
| TEST (PCL, SHOTShapeAndColorEstimationOpenMP) | |
| TEST (PCL, 3DSCEstimation) | |
| TEST (PCL, USCEstimation) | |
| TEST (PCL, SHOTShapeEstimationEigen) | |
| TEST (PCL, GenericSHOTShapeEstimationEigen) | |
| TEST (PCL, SHOTShapeAndColorEstimationEigen) | |
| TEST (PCL, 3DSCEstimationEigen) | |
| TEST (PCL, USCEstimationEigen) | |
| template<typename FeatureEstimation , typename PointT , typename NormalT , typename OutputT > | |
| void | testSHOTIndicesAndSearchSurface (const typename PointCloud< PointT >::Ptr &points, const typename PointCloud< NormalT >::Ptr &normals, const boost::shared_ptr< vector< int > > &indices, const int nr_shape_bins=10, const int nr_color_bins=30, const bool describe_shape=true, const bool describe_color=false) |
| template<typename FeatureEstimation , typename PointT , typename NormalT > | |
| void | testSHOTIndicesAndSearchSurfaceEigen (const typename PointCloud< PointT >::Ptr &points, const typename PointCloud< NormalT >::Ptr &normals, const boost::shared_ptr< vector< int > > &indices, const int nr_shape_bins=10, const int nr_color_bins=30, const bool describe_shape=true, const bool describe_color=false) |
Variables | |
| PointCloud< PointXYZ > | cloud |
| vector< int > | indices |
| KdTreePtr | tree |
Typedef Documentation
| typedef search::KdTree<PointXYZ>::Ptr KdTreePtr |
Definition at line 53 of file test_shot_estimation.cpp.
Function Documentation
| FeatureEstimation createSHOTDesc | ( | const typename PointCloud< NormalT >::Ptr & | normals, |
| const int | nr_shape_bins = 10, |
||
| const int | = 30, |
||
| const bool | = true, |
||
| const bool | = false |
||
| ) |
Definition at line 88 of file test_shot_estimation.cpp.
| FeatureEstimation createSHOTDesc | ( | const typename PointCloud< NormalT >::Ptr & | normals, |
| const int | nr_shape_bins = 10, |
||
| const int | nr_color_bins = 30, |
||
| const bool | describe_shape = true, |
||
| const bool | describe_color = false |
||
| ) |
Definition at line 101 of file test_shot_estimation.cpp.
| ShapeContext3DEstimation<PointXYZ, Normal, SHOT> createSHOTDesc< ShapeContext3DEstimation< PointXYZ, Normal, SHOT >, PointXYZ, Normal, SHOT > | ( | const PointCloud< Normal >::Ptr & | normals, |
| const int | , | ||
| const int | , | ||
| const bool | , | ||
| const bool | |||
| ) |
Definition at line 114 of file test_shot_estimation.cpp.
| UniqueShapeContext<PointXYZ, SHOT> createSHOTDesc< UniqueShapeContext< PointXYZ, SHOT >, PointXYZ, Normal, SHOT > | ( | const PointCloud< Normal >::Ptr & | , |
| const int | , | ||
| const int | , | ||
| const bool | , | ||
| const bool | |||
| ) |
Definition at line 133 of file test_shot_estimation.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 1187 of file test_shot_estimation.cpp.
| void shotCopyPointCloud | ( | const PointCloud< SHOT > & | cloud_in, |
| const std::vector< int > & | indices, | ||
| PointCloud< SHOT > & | cloud_out | ||
| ) |
Definition at line 61 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| SHOTShapeEstimation | |||
| ) |
Definition at line 234 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| GenericSHOTShapeEstimation | |||
| ) |
Definition at line 298 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| SHOTShapeAndColorEstimation | |||
| ) |
Definition at line 353 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| SHOTShapeEstimationOpenMP | |||
| ) |
Definition at line 432 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| SHOTShapeAndColorEstimationOpenMP | |||
| ) |
Definition at line 484 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| 3DSCEstimation | |||
| ) |
Definition at line 566 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| USCEstimation | |||
| ) |
Definition at line 651 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| SHOTShapeEstimationEigen | |||
| ) |
Definition at line 837 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| GenericSHOTShapeEstimationEigen | |||
| ) |
Definition at line 900 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| SHOTShapeAndColorEstimationEigen | |||
| ) |
Definition at line 955 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| 3DSCEstimationEigen | |||
| ) |
Definition at line 1034 of file test_shot_estimation.cpp.
| TEST | ( | PCL | , |
| USCEstimationEigen | |||
| ) |
Definition at line 1121 of file test_shot_estimation.cpp.
| void testSHOTIndicesAndSearchSurface | ( | const typename PointCloud< PointT >::Ptr & | points, |
| const typename PointCloud< NormalT >::Ptr & | normals, | ||
| const boost::shared_ptr< vector< int > > & | indices, | ||
| const int | nr_shape_bins = 10, |
||
| const int | nr_color_bins = 30, |
||
| const bool | describe_shape = true, |
||
| const bool | describe_color = false |
||
| ) |
Definition at line 152 of file test_shot_estimation.cpp.
| void testSHOTIndicesAndSearchSurfaceEigen | ( | const typename PointCloud< PointT >::Ptr & | points, |
| const typename PointCloud< NormalT >::Ptr & | normals, | ||
| const boost::shared_ptr< vector< int > > & | indices, | ||
| const int | nr_shape_bins = 10, |
||
| const int | nr_color_bins = 30, |
||
| const bool | describe_shape = true, |
||
| const bool | describe_color = false |
||
| ) |
Definition at line 755 of file test_shot_estimation.cpp.
Variable Documentation
Definition at line 55 of file test_shot_estimation.cpp.
| vector<int> indices |
Definition at line 56 of file test_shot_estimation.cpp.
Definition at line 57 of file test_shot_estimation.cpp.