#include <gtest/gtest.h>#include <vector>#include <stdio.h>#include <pcl/common/time.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/octree/octree.h>#include <pcl/octree/octree_impl.h>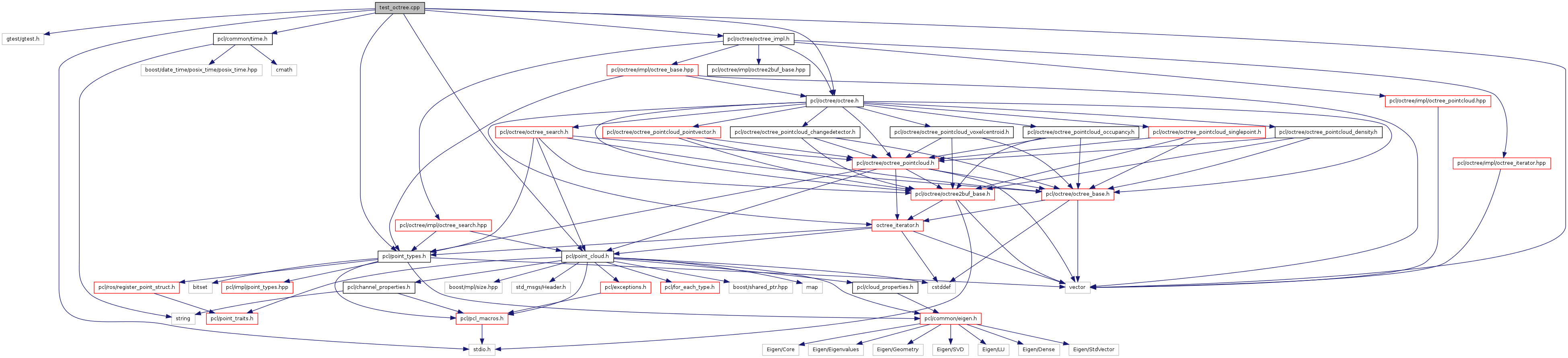
Go to the source code of this file.
Classes | |
| class | prioPointQueueEntry |
Defines | |
| #define | TESTPOINTS 3000 |
| #define | TESTPOINTS 3000 |
Functions | |
| int | main (int argc, char **argv) |
| TEST (PCL, Octree_Test) | |
| TEST (PCL, Octree_Dynamic_Depth_Test) | |
| TEST (PCL, Octree2Buf_Test) | |
| TEST (PCL, Octree2Buf_Base_Double_Buffering_Test) | |
| TEST (PCL, Octree2Buf_Base_Double_Buffering_XOR_Test) | |
| TEST (PCL, Octree_Pointcloud_Test) | |
| TEST (PCL, Octree_Pointcloud_Density_Test) | |
| TEST (PCL, Octree_Pointcloud_Iterator_Test) | |
| TEST (PCL, Octree_Pointcloud_Occupancy_Test) | |
| TEST (PCL, Octree_Pointcloud_Change_Detector_Test) | |
| TEST (PCL, Octree_Pointcloud_Voxel_Centroid_Test) | |
| TEST (PCL, Octree_Pointcloud_Nearest_K_Neighbour_Search) | |
| TEST (PCL, Octree_Pointcloud_Box_Search) | |
| TEST (PCL, Octree_Pointcloud_Approx_Nearest_Neighbour_Search) | |
| TEST (PCL, Octree_Pointcloud_Neighbours_Within_Radius_Search) | |
| TEST (PCL, Octree_Pointcloud_Ray_Traversal) | |
Define Documentation
| #define TESTPOINTS 3000 |
| #define TESTPOINTS 3000 |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 1605 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Test | |||
| ) |
Definition at line 55 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Dynamic_Depth_Test | |||
| ) |
Definition at line 247 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree2Buf_Test | |||
| ) |
Definition at line 348 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree2Buf_Base_Double_Buffering_Test | |||
| ) |
Definition at line 513 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree2Buf_Base_Double_Buffering_XOR_Test | |||
| ) |
Definition at line 596 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Test | |||
| ) |
Definition at line 670 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Density_Test | |||
| ) |
Definition at line 851 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Iterator_Test | |||
| ) |
Definition at line 891 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Occupancy_Test | |||
| ) |
Definition at line 982 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Change_Detector_Test | |||
| ) |
Definition at line 1028 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Voxel_Centroid_Test | |||
| ) |
Definition at line 1090 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Nearest_K_Neighbour_Search | |||
| ) |
Definition at line 1165 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Box_Search | |||
| ) |
Definition at line 1276 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Approx_Nearest_Neighbour_Search | |||
| ) |
Definition at line 1350 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Neighbours_Within_Radius_Search | |||
| ) |
Definition at line 1428 of file octree/test/test_octree.cpp.
| TEST | ( | PCL | , |
| Octree_Pointcloud_Ray_Traversal | |||
| ) |
Definition at line 1517 of file octree/test/test_octree.cpp.