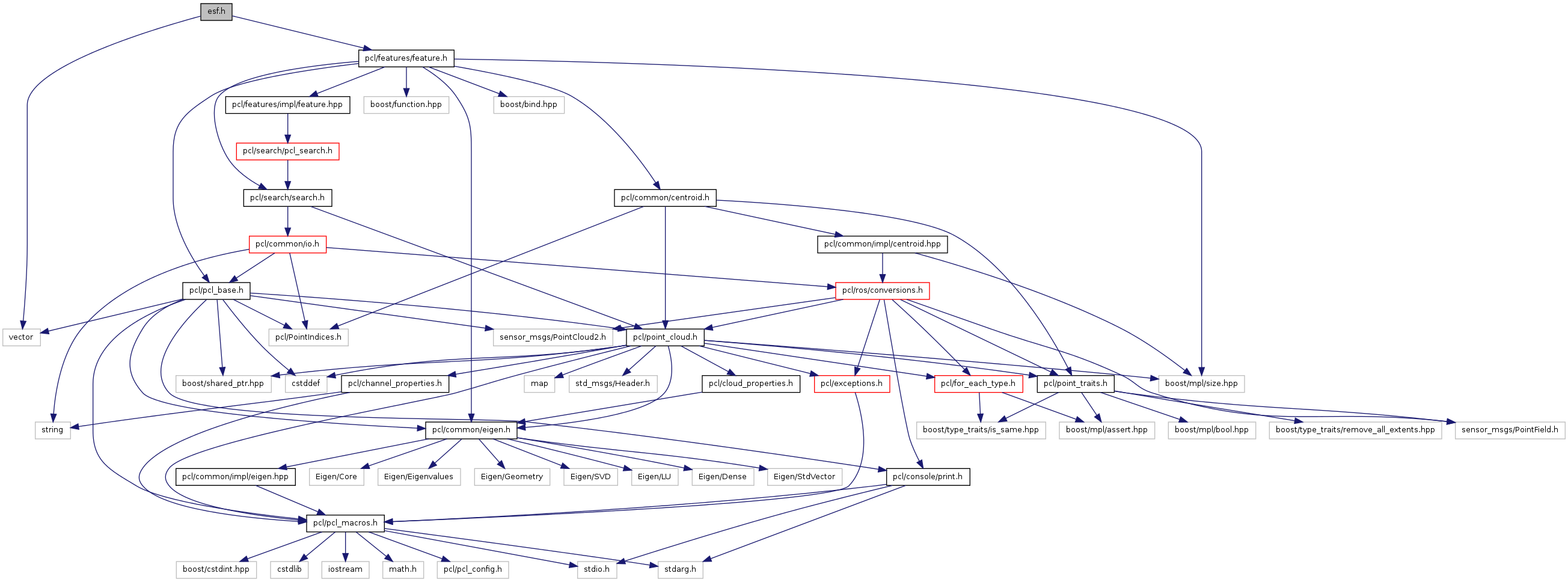
Include dependency graph for esf.h:
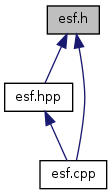
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::ESFEstimation< PointInT, PointOutT > |
| ESFEstimation estimates the ensemble of shape functions descriptors for a given point cloud dataset containing points. Shape functions are D2, D3, A3. For more information about the ESF descriptor, see: Walter Wohlkinger and Markus Vincze, "Ensemble of Shape Functions for 3D Object Classification", IEEE International Conference on Robotics and Biomimetics (IEEE-ROBIO), 2011 More... | |
Namespaces | |
| namespace | pcl |
Defines | |
| #define | GRIDSIZE 64 |
| #define | GRIDSIZE_H GRIDSIZE/2 |
Define Documentation
| #define GRIDSIZE_H GRIDSIZE/2 |