NormalSpaceSampling samples the input point cloud in the space of normal directions computed at every point. More...
#include <normal_space.h>
Public Member Functions | |
| void | getBins (unsigned int &binsx, unsigned int &binsy, unsigned int &binsz) const |
| Get the number of bins in x, y and z direction. | |
| NormalsPtr | getNormals () const |
| Get the normals computed on the input point cloud. | |
| unsigned int | getSample () const |
| Get the value of the internal sample parameter. | |
| unsigned int | getSeed () const |
| Get the value of the internal seed parameter. | |
| NormalSpaceSampling () | |
| Empty constructor. | |
| void | setBins (unsigned int binsx, unsigned int binsy, unsigned int binsz) |
| Set the number of bins in x, y and z direction. | |
| void | setNormals (const NormalsPtr &normals) |
| Set the normals computed on the input point cloud. | |
| void | setSample (unsigned int sample) |
| Set number of indices to be sampled. | |
| void | setSeed (unsigned int seed) |
| Set seed of random function. | |
Protected Member Functions | |
| void | applyFilter (PointCloud &output) |
| Sample of point indices into a separate PointCloud. | |
| void | applyFilter (std::vector< int > &indices) |
| Sample of point indices. | |
Protected Attributes | |
| unsigned int | binsx_ |
| Number of bins in x direction. | |
| unsigned int | binsy_ |
| Number of bins in y direction. | |
| unsigned int | binsz_ |
| Number of bins in z direction. | |
| NormalsPtr | input_normals_ |
| The normals computed at each point in the input cloud. | |
| unsigned int | sample_ |
| Number of indices that will be returned. | |
| unsigned int | seed_ |
| Random number seed. | |
Private Types | |
| typedef pcl::PointCloud < NormalT >::Ptr | NormalsPtr |
| typedef FilterIndices< PointT > ::PointCloud | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Private Member Functions | |
| unsigned int | findBin (float *normal, unsigned int nbins) |
| Finds the bin number of the input normal, returns the bin number. | |
| bool | isEntireBinSampled (boost::dynamic_bitset<> &array, unsigned int start_index, unsigned int length) |
| Checks of the entire bin is sampled, returns true or false. | |
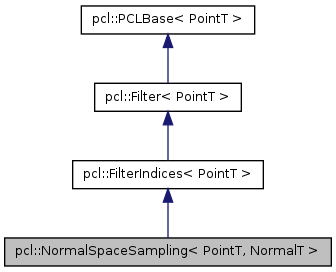
Detailed Description
template<typename PointT, typename NormalT>
class pcl::NormalSpaceSampling< PointT, NormalT >
NormalSpaceSampling samples the input point cloud in the space of normal directions computed at every point.
Definition at line 53 of file normal_space.h.
Member Typedef Documentation
typedef pcl::PointCloud<NormalT>::Ptr pcl::NormalSpaceSampling< PointT, NormalT >::NormalsPtr [private] |
Definition at line 63 of file normal_space.h.
typedef FilterIndices<PointT>::PointCloud pcl::NormalSpaceSampling< PointT, NormalT >::PointCloud [private] |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 60 of file normal_space.h.
typedef PointCloud::ConstPtr pcl::NormalSpaceSampling< PointT, NormalT >::PointCloudConstPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 62 of file normal_space.h.
typedef PointCloud::Ptr pcl::NormalSpaceSampling< PointT, NormalT >::PointCloudPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 61 of file normal_space.h.
Constructor & Destructor Documentation
| pcl::NormalSpaceSampling< PointT, NormalT >::NormalSpaceSampling | ( | ) | [inline] |
Empty constructor.
Definition at line 67 of file normal_space.h.
Member Function Documentation
| void pcl::NormalSpaceSampling< PointT, NormalT >::applyFilter | ( | PointCloud & | output | ) | [protected, virtual] |
Sample of point indices into a separate PointCloud.
- Parameters:
-
[out] output the resultant point cloud
Implements pcl::Filter< PointT >.
Definition at line 48 of file normal_space.hpp.
| void pcl::NormalSpaceSampling< PointT, NormalT >::applyFilter | ( | std::vector< int > & | indices | ) | [protected, virtual] |
Sample of point indices.
- Parameters:
-
[out] indices the resultant point cloud indices
Implements pcl::FilterIndices< PointT >.
Definition at line 222 of file normal_space.hpp.
| unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::findBin | ( | float * | normal, |
| unsigned int | nbins | ||
| ) | [private] |
Finds the bin number of the input normal, returns the bin number.
- Parameters:
-
[in] normal the input normal [in] nbins total number of bins
Definition at line 160 of file normal_space.hpp.
| void pcl::NormalSpaceSampling< PointT, NormalT >::getBins | ( | unsigned int & | binsx, |
| unsigned int & | binsy, | ||
| unsigned int & | binsz | ||
| ) | const [inline] |
Get the number of bins in x, y and z direction.
- Parameters:
-
[out] binsx number of bins in x direction [out] binsy number of bins in y direction [out] binsz number of bins in z direction
Definition at line 124 of file normal_space.h.
| NormalsPtr pcl::NormalSpaceSampling< PointT, NormalT >::getNormals | ( | ) | const [inline] |
Get the normals computed on the input point cloud.
Definition at line 139 of file normal_space.h.
| unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::getSample | ( | ) | const [inline] |
Get the value of the internal sample parameter.
Definition at line 84 of file normal_space.h.
| unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::getSeed | ( | ) | const [inline] |
Get the value of the internal seed parameter.
Definition at line 100 of file normal_space.h.
| bool pcl::NormalSpaceSampling< PointT, NormalT >::isEntireBinSampled | ( | boost::dynamic_bitset<> & | array, |
| unsigned int | start_index, | ||
| unsigned int | length | ||
| ) | [private] |
Checks of the entire bin is sampled, returns true or false.
- Parameters:
-
[out] array flag which says whether a point is sampled or not [in] start_index the index to the first point of the bin in array. [in] length number of points in the bin
Definition at line 148 of file normal_space.hpp.
| void pcl::NormalSpaceSampling< PointT, NormalT >::setBins | ( | unsigned int | binsx, |
| unsigned int | binsy, | ||
| unsigned int | binsz | ||
| ) | [inline] |
Set the number of bins in x, y and z direction.
- Parameters:
-
[in] binsx number of bins in x direction [in] binsy number of bins in y direction [in] binsz number of bins in z direction
Definition at line 111 of file normal_space.h.
| void pcl::NormalSpaceSampling< PointT, NormalT >::setNormals | ( | const NormalsPtr & | normals | ) | [inline] |
Set the normals computed on the input point cloud.
- Parameters:
-
[in] normals the normals computed for the input cloud
Definition at line 135 of file normal_space.h.
| void pcl::NormalSpaceSampling< PointT, NormalT >::setSample | ( | unsigned int | sample | ) | [inline] |
Set number of indices to be sampled.
- Parameters:
-
[in] sample the number of sample indices
Definition at line 77 of file normal_space.h.
| void pcl::NormalSpaceSampling< PointT, NormalT >::setSeed | ( | unsigned int | seed | ) | [inline] |
Set seed of random function.
- Parameters:
-
[in] seed the input seed
Definition at line 93 of file normal_space.h.
Member Data Documentation
unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::binsx_ [protected] |
Number of bins in x direction.
Definition at line 148 of file normal_space.h.
unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::binsy_ [protected] |
Number of bins in y direction.
Definition at line 150 of file normal_space.h.
unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::binsz_ [protected] |
Number of bins in z direction.
Definition at line 152 of file normal_space.h.
NormalsPtr pcl::NormalSpaceSampling< PointT, NormalT >::input_normals_ [protected] |
The normals computed at each point in the input cloud.
Definition at line 155 of file normal_space.h.
unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::sample_ [protected] |
Number of indices that will be returned.
Definition at line 143 of file normal_space.h.
unsigned int pcl::NormalSpaceSampling< PointT, NormalT >::seed_ [protected] |
Random number seed.
Definition at line 145 of file normal_space.h.
The documentation for this class was generated from the following files: