BoundaryEstimation estimates whether a set of points is lying on surface boundaries using an angle criterion. The code makes use of the estimated surface normals at each point in the input dataset. More...
#include <boundary.h>
Public Types | |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Public Member Functions | |
| BoundaryEstimation () | |
| Empty constructor. The angular threshold angle_threshold_ is set to M_PI / 2.0. | |
| float | getAngleThreshold () |
| Get the decision boundary (angle threshold) as set by the user. | |
| void | getCoordinateSystemOnPlane (const PointNT &p_coeff, Eigen::Vector4f &u, Eigen::Vector4f &v) |
| Get a u-v-n coordinate system that lies on a plane defined by its normal. | |
| bool | isBoundaryPoint (const pcl::PointCloud< PointInT > &cloud, int q_idx, const std::vector< int > &indices, const Eigen::Vector4f &u, const Eigen::Vector4f &v, const float angle_threshold) |
| Check whether a point is a boundary point in a planar patch of projected points given by indices. | |
| bool | isBoundaryPoint (const pcl::PointCloud< PointInT > &cloud, const PointInT &q_point, const std::vector< int > &indices, const Eigen::Vector4f &u, const Eigen::Vector4f &v, const float angle_threshold) |
| Check whether a point is a boundary point in a planar patch of projected points given by indices. | |
| void | setAngleThreshold (float angle) |
Set the decision boundary (angle threshold) that marks points as boundary or regular. (default  ) ) | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate whether a set of points is lying on surface boundaries using an angle criterion for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Protected Attributes | |
| float | angle_threshold_ |
| The decision boundary (angle threshold) that marks points as boundary or regular. (default ) | |
Private Member Functions | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &) |
| Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class. | |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT>
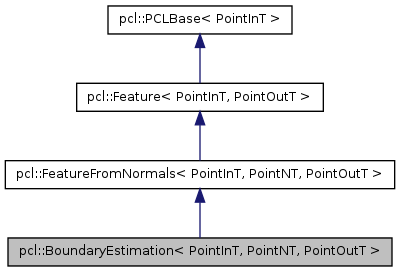
class pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >
BoundaryEstimation estimates whether a set of points is lying on surface boundaries using an angle criterion. The code makes use of the estimated surface normals at each point in the input dataset.
Here's an example for estimating boundary points for a PointXYZ point cloud:
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); // fill in the cloud data here pcl::PointCloud<pcl::Normal>::Ptr normals (new pcl::PointCloud<pcl::Normal>); // estimate normals and fill in \a normals pcl::PointCloud<pcl::Boundary> boundaries; pcl::BoundaryEstimation<pcl::PointXYZ, pcl::Normal, pcl::Boundary> est; est.setInputCloud (cloud); est.setInputNormals (normals); est.setRadiusSearch (0.02); // 2cm radius est.setSearchMethod (typename pcl::search::KdTree<PointXYZ>::Ptr (new pcl::search::KdTree<PointXYZ>) est.compute (boundaries);
- Attention:
- The convention for Boundary features is:
- if a query point's nearest neighbors cannot be estimated, the boundary feature will be set to NaN (not a number)
- it is impossible to estimate a boundary property for a point that doesn't have finite 3D coordinates. Therefore, any point that contains NaN data on x, y, or z, will have its boundary feature property set to NaN.
Definition at line 80 of file boundary.h.
Member Typedef Documentation
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 94 of file boundary.h.
Constructor & Destructor Documentation
| pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::BoundaryEstimation | ( | ) | [inline] |
Empty constructor. The angular threshold angle_threshold_ is set to M_PI / 2.0.
Definition at line 100 of file boundary.h.
Member Function Documentation
| void pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate whether a set of points is lying on surface boundaries using an angle criterion for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters:
-
[out] output the resultant point cloud model dataset that contains boundary point estimates
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 114 of file boundary.hpp.
| void pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | ) | [inline, private, virtual] |
Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::BoundaryEstimation< PointInT, PointNT, Eigen::MatrixXf >.
Definition at line 182 of file boundary.h.
| float pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::getAngleThreshold | ( | ) | [inline] |
Get the decision boundary (angle threshold) as set by the user.
Definition at line 146 of file boundary.h.
| void pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::getCoordinateSystemOnPlane | ( | const PointNT & | p_coeff, |
| Eigen::Vector4f & | u, | ||
| Eigen::Vector4f & | v | ||
| ) | [inline] |
Get a u-v-n coordinate system that lies on a plane defined by its normal.
- Parameters:
-
[in] p_coeff the plane coefficients (containing the plane normal) [out] u the resultant u direction [out] v the resultant v direction
Definition at line 157 of file boundary.h.
| bool pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::isBoundaryPoint | ( | const pcl::PointCloud< PointInT > & | cloud, |
| int | q_idx, | ||
| const std::vector< int > & | indices, | ||
| const Eigen::Vector4f & | u, | ||
| const Eigen::Vector4f & | v, | ||
| const float | angle_threshold | ||
| ) |
Check whether a point is a boundary point in a planar patch of projected points given by indices.
- Note:
- A coordinate system u-v-n must be computed a-priori using getCoordinateSystemOnPlane
- Parameters:
-
[in] cloud a pointer to the input point cloud [in] q_idx the index of the query point in cloud [in] indices the estimated point neighbors of the query point [in] u the u direction [in] v the v direction [in] angle_threshold the threshold angle (default )
Definition at line 48 of file boundary.hpp.
| bool pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::isBoundaryPoint | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const PointInT & | q_point, | ||
| const std::vector< int > & | indices, | ||
| const Eigen::Vector4f & | u, | ||
| const Eigen::Vector4f & | v, | ||
| const float | angle_threshold | ||
| ) |
Check whether a point is a boundary point in a planar patch of projected points given by indices.
- Note:
- A coordinate system u-v-n must be computed a-priori using getCoordinateSystemOnPlane
- Parameters:
-
[in] cloud a pointer to the input point cloud [in] q_point a pointer to the querry point [in] indices the estimated point neighbors of the query point [in] u the u direction [in] v the v direction [in] angle_threshold the threshold angle (default )
Definition at line 59 of file boundary.hpp.
| void pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::setAngleThreshold | ( | float | angle | ) | [inline] |
Set the decision boundary (angle threshold) that marks points as boundary or regular. (default )
- Parameters:
-
[in] angle the angle threshold
Definition at line 139 of file boundary.h.
Member Data Documentation
float pcl::BoundaryEstimation< PointInT, PointNT, PointOutT >::angle_threshold_ [protected] |
The decision boundary (angle threshold) that marks points as boundary or regular. (default )
Definition at line 175 of file boundary.h.
The documentation for this class was generated from the following files: