#include "outlet_pose_estimation/detail/constellation.h"#include "outlet_pose_estimation/detail/outlet_tuple.h"#include "outlet_pose_estimation/detail/affine_transform.h"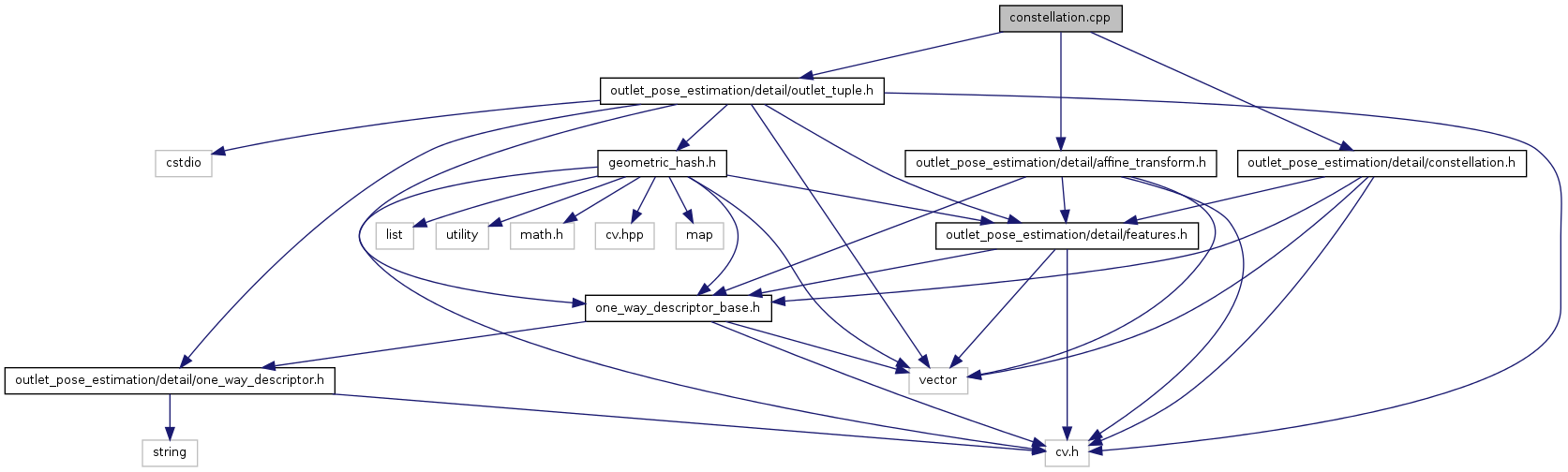
Go to the source code of this file.
Functions | |
| float | calc_set_std (const vector< feature_t > &features, const vector< int > &indices) |
| float | CalcReprojectionError (CvMat *src_points, CvMat *dst_points, CvMat *src_proj_points, CvMat *homography) |
| void | ClusterOutletFeatures (const vector< feature_t > &src_features, vector< feature_t > &clusters, float max_dist) |
| void | count_parts (const vector< feature_t > &features, int *min_part_count, int parts_number) |
| void | DetectObjectConstellation (const vector< feature_t > &train, const vector< feature_t > &input, CvMat *homography, vector< int > &indices) |
| void | features2points (const vector< feature_t > &features, vector< CvPoint2D32f > &points) |
| void | FilterOutletFeatures (const vector< feature_t > &src_features, vector< feature_t > &dst_features, float max_dist) |
| void | FilterOutletFeatures (const vector< feature_t > &src_features, vector< feature_t > &dst_features, vector< int > &dst_indexes, float max_dist) |
| void | InferMissingObjects (const vector< feature_t > &train, const vector< feature_t > &input, CvMat *homography, const vector< int > &indices, vector< feature_t > &full) |
| int | iterate_indices (vector< int > &indices, int max_index, int min_valid_indices, int *workspace) |
| void | map_features (const vector< feature_t > &src_features, CvMat *homography, vector< feature_t > &dst_features) |
| float | max_idx (float v1, float v2, int i1, int i2) |
| float | min_idx (float v1, float v2, int i1, int i2) |
| void | points2features (const vector< CvPoint2D32f > &points, vector< feature_t > &features) |
| void | SelectNeighborFeatures (const vector< feature_t > &src_features, CvPoint center, vector< feature_t > &dst_features, float max_dist) |
| int | validate_order (const vector< feature_t > &train, const vector< feature_t > &test, const vector< int > &indices) |
| int | validate_parts (const vector< feature_t > &train, const vector< feature_t > &test, const vector< int > &indices, int *min_part_count) |
Function Documentation
| float calc_set_std | ( | const vector< feature_t > & | features, |
| const vector< int > & | indices | ||
| ) |
Definition at line 157 of file constellation.cpp.
| float CalcReprojectionError | ( | CvMat * | src_points, |
| CvMat * | dst_points, | ||
| CvMat * | src_proj_points, | ||
| CvMat * | homography | ||
| ) |
Definition at line 196 of file constellation.cpp.
| void ClusterOutletFeatures | ( | const vector< feature_t > & | src_features, |
| vector< feature_t > & | clusters, | ||
| float | max_dist | ||
| ) |
Definition at line 538 of file constellation.cpp.
| void count_parts | ( | const vector< feature_t > & | features, |
| int * | min_part_count, | ||
| int | parts_number | ||
| ) |
Definition at line 213 of file constellation.cpp.
| void DetectObjectConstellation | ( | const vector< feature_t > & | train, |
| const vector< feature_t > & | input, | ||
| CvMat * | homography, | ||
| vector< int > & | indices | ||
| ) |
Definition at line 232 of file constellation.cpp.
| void features2points | ( | const vector< feature_t > & | features, |
| vector< CvPoint2D32f > & | points | ||
| ) |
Definition at line 358 of file constellation.cpp.
| void FilterOutletFeatures | ( | const vector< feature_t > & | src_features, |
| vector< feature_t > & | dst_features, | ||
| float | max_dist | ||
| ) |
Definition at line 420 of file constellation.cpp.
| void FilterOutletFeatures | ( | const vector< feature_t > & | src_features, |
| vector< feature_t > & | dst_features, | ||
| vector< int > & | dst_indexes, | ||
| float | max_dist | ||
| ) |
Definition at line 480 of file constellation.cpp.
| void InferMissingObjects | ( | const vector< feature_t > & | train, |
| const vector< feature_t > & | input, | ||
| CvMat * | homography, | ||
| const vector< int > & | indices, | ||
| vector< feature_t > & | full | ||
| ) |
Definition at line 385 of file constellation.cpp.
| int iterate_indices | ( | vector< int > & | indices, |
| int | max_index, | ||
| int | min_valid_indices, | ||
| int * | workspace | ||
| ) |
Definition at line 16 of file constellation.cpp.
| void map_features | ( | const vector< feature_t > & | src_features, |
| CvMat * | homography, | ||
| vector< feature_t > & | dst_features | ||
| ) |
Definition at line 375 of file constellation.cpp.
| float max_idx | ( | float | v1, |
| float | v2, | ||
| int | i1, | ||
| int | i2 | ||
| ) |
Definition at line 104 of file constellation.cpp.
| float min_idx | ( | float | v1, |
| float | v2, | ||
| int | i1, | ||
| int | i2 | ||
| ) |
Definition at line 91 of file constellation.cpp.
| void points2features | ( | const vector< CvPoint2D32f > & | points, |
| vector< feature_t > & | features | ||
| ) |
Definition at line 366 of file constellation.cpp.
| void SelectNeighborFeatures | ( | const vector< feature_t > & | src_features, |
| CvPoint | center, | ||
| vector< feature_t > & | dst_features, | ||
| float | max_dist | ||
| ) |
Definition at line 580 of file constellation.cpp.
| int validate_order | ( | const vector< feature_t > & | train, |
| const vector< feature_t > & | test, | ||
| const vector< int > & | indices | ||
| ) |
Definition at line 117 of file constellation.cpp.
| int validate_parts | ( | const vector< feature_t > & | train, |
| const vector< feature_t > & | test, | ||
| const vector< int > & | indices, | ||
| int * | min_part_count | ||
| ) |
Definition at line 65 of file constellation.cpp.