#include <moveit/collision_detection/collision_matrix.h>#include <moveit/robot_state/robot_state.h>#include <moveit_msgs/LinkPadding.h>#include <moveit_msgs/LinkScale.h>
Include dependency graph for collision_robot.h:

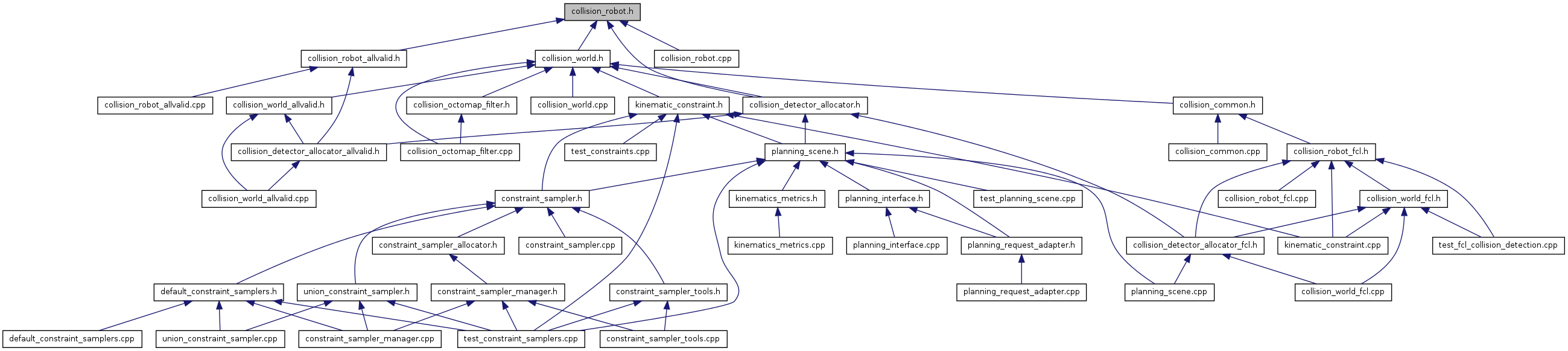
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | collision_detection::CollisionRobot |
| This class represents a collision model of the robot and can be used for self collision checks (to check if the robot is in collision with itself) or in collision checks with a different robot. Collision checks with the environment are performed using the CollisionWorld class. More... | |
Namespaces | |
| namespace | collision_detection |
Generic interface to collision detection. | |
Typedefs | |
| typedef boost::shared_ptr < const CollisionRobot > | collision_detection::CollisionRobotConstPtr |
| typedef boost::shared_ptr < CollisionRobot > | collision_detection::CollisionRobotPtr |