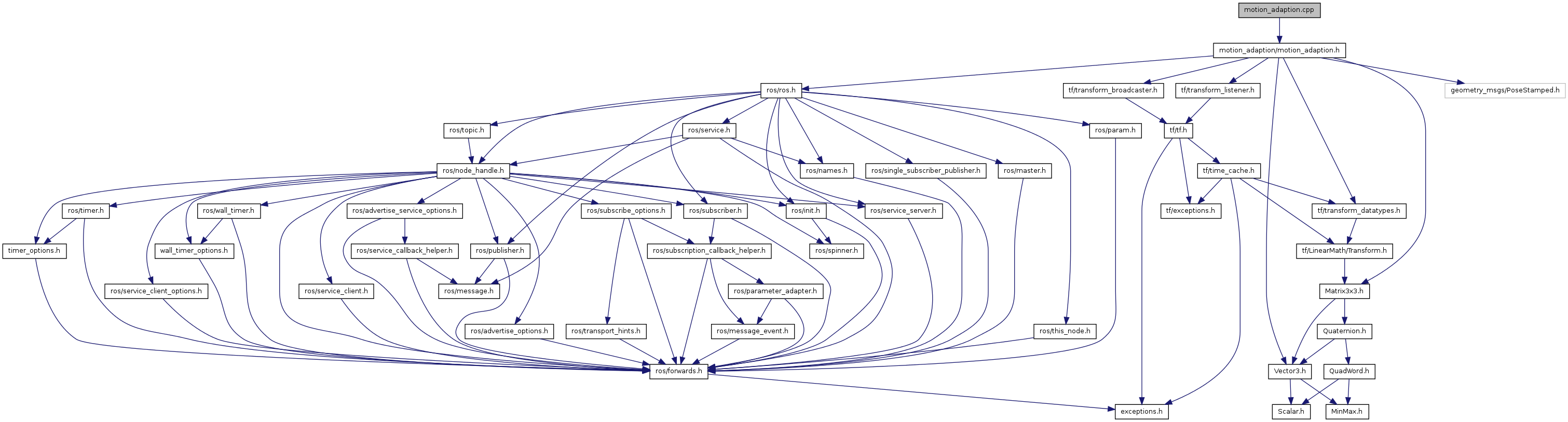
#include "motion_adaption/motion_adaption.h"
Include dependency graph for motion_adaption.cpp:
Go to the source code of this file.
Variables | |
| static const std::string | NO_NAME_STRING = "no valid transform name" |
| static const double | ROBOT_HEAD_HEIGHT_DEFAULT = 0.41200 |
| static const double | ROBOT_LOWER_ARM_LENGTH_DEFAULT = 0.23950 |
| static const double | ROBOT_SHOULDER_HEIGHT_DEFAULT = 0.21732 |
| static const double | ROBOT_SHOULDER_WIDTH_DEFAULT = 0.46382 |
| static const double | ROBOT_SHOULDER_X_OFFSET_DEFAULT = 0.01500 |
| static const double | ROBOT_UPPER_ARM_LENGTH_DEFAULT = 0.23000 |
| static const std::string | SUB_TOPIC_POSE_ELBOW_LEFT = "pose_elbow_left" |
| static const std::string | SUB_TOPIC_POSE_ELBOW_RIGHT = "pose_elbow_right" |
| static const std::string | SUB_TOPIC_POSE_HAND_LEFT = "pose_hand_left" |
| static const std::string | SUB_TOPIC_POSE_HAND_RIGHT = "pose_hand_right" |
| static const std::string | SUB_TOPIC_POSE_HEAD = "pose_head" |
| static const std::string | SUB_TOPIC_POSE_TORSO = "pose_torso" |
| static const double | WAIT_FOR_TF_IN_S = 0.5 |
Variable Documentation
const std::string NO_NAME_STRING = "no valid transform name" [static] |
Definition at line 42 of file motion_adaption.cpp.
const double ROBOT_HEAD_HEIGHT_DEFAULT = 0.41200 [static] |
Definition at line 48 of file motion_adaption.cpp.
const double ROBOT_LOWER_ARM_LENGTH_DEFAULT = 0.23950 [static] |
Definition at line 47 of file motion_adaption.cpp.
const double ROBOT_SHOULDER_HEIGHT_DEFAULT = 0.21732 [static] |
Definition at line 43 of file motion_adaption.cpp.
const double ROBOT_SHOULDER_WIDTH_DEFAULT = 0.46382 [static] |
Definition at line 44 of file motion_adaption.cpp.
const double ROBOT_SHOULDER_X_OFFSET_DEFAULT = 0.01500 [static] |
Definition at line 45 of file motion_adaption.cpp.
const double ROBOT_UPPER_ARM_LENGTH_DEFAULT = 0.23000 [static] |
Definition at line 46 of file motion_adaption.cpp.
const std::string SUB_TOPIC_POSE_ELBOW_LEFT = "pose_elbow_left" [static] |
Definition at line 53 of file motion_adaption.cpp.
const std::string SUB_TOPIC_POSE_ELBOW_RIGHT = "pose_elbow_right" [static] |
Definition at line 51 of file motion_adaption.cpp.
const std::string SUB_TOPIC_POSE_HAND_LEFT = "pose_hand_left" [static] |
Definition at line 54 of file motion_adaption.cpp.
const std::string SUB_TOPIC_POSE_HAND_RIGHT = "pose_hand_right" [static] |
Definition at line 52 of file motion_adaption.cpp.
const std::string SUB_TOPIC_POSE_HEAD = "pose_head" [static] |
Definition at line 50 of file motion_adaption.cpp.
const std::string SUB_TOPIC_POSE_TORSO = "pose_torso" [static] |
Definition at line 49 of file motion_adaption.cpp.
const double WAIT_FOR_TF_IN_S = 0.5 [static] |
Definition at line 41 of file motion_adaption.cpp.