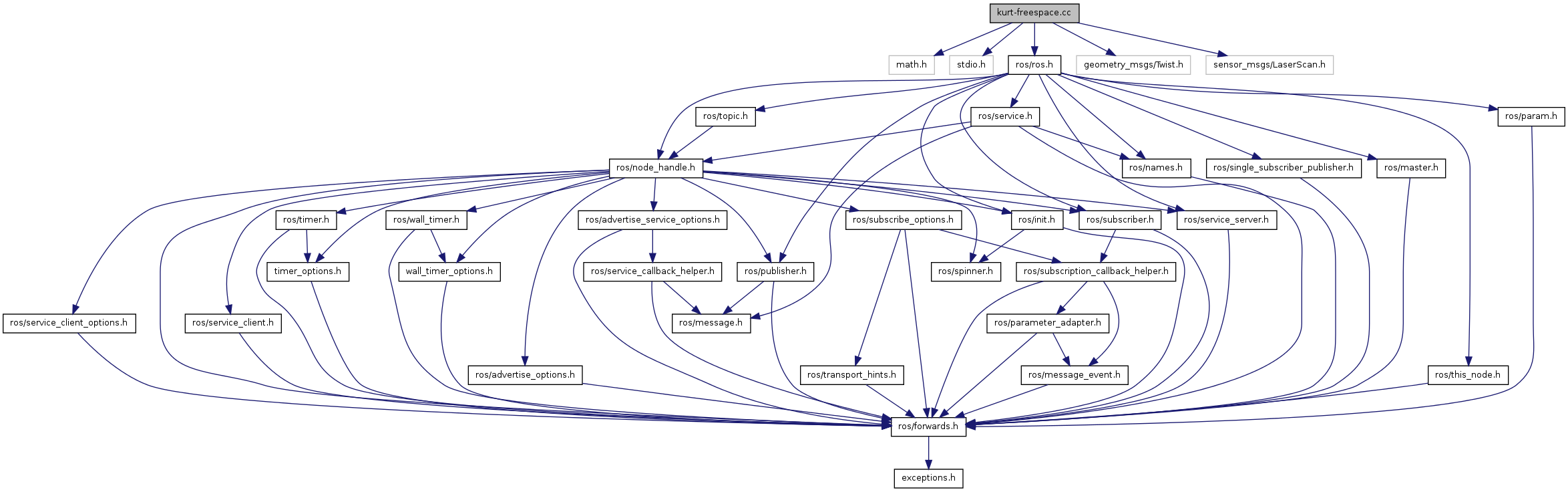
#include <math.h>#include <stdio.h>#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <sensor_msgs/LaserScan.h>
Include dependency graph for kurt-freespace.cc:
Go to the source code of this file.
Defines | |
| #define | EPSILON 0.000001 |
| #define | INVPIDIV180 57.29578 /* 180 / pi */ |
| #define | min(a, b) ((a)<(b)?(a):(b)) |
Functions | |
| void | autonomous_behave (const sensor_msgs::LaserScan::ConstPtr &laser) |
| double | calc_freespace (const sensor_msgs::LaserScan::ConstPtr &laser) |
| int | main (int argc, char **argv) |
| int | SICK_Check_range (const sensor_msgs::LaserScan::ConstPtr &laser, double xregion, double yregion, int *index_to_obstacle, double *distance_to_obstacle) |
Variables | |
| double | max_rotational_vel |
| double | max_vel_x |
| ros::Publisher | vel_pub |
Define Documentation
| #define EPSILON 0.000001 |
Definition at line 8 of file kurt-freespace.cc.
| #define INVPIDIV180 57.29578 /* 180 / pi */ |
Definition at line 7 of file kurt-freespace.cc.
| #define min | ( | a, | |
| b | |||
| ) | ((a)<(b)?(a):(b)) |
Definition at line 9 of file kurt-freespace.cc.
Function Documentation
| void autonomous_behave | ( | const sensor_msgs::LaserScan::ConstPtr & | laser | ) |
Definition at line 91 of file kurt-freespace.cc.
| double calc_freespace | ( | const sensor_msgs::LaserScan::ConstPtr & | laser | ) |
Definition at line 14 of file kurt-freespace.cc.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 166 of file kurt-freespace.cc.
| int SICK_Check_range | ( | const sensor_msgs::LaserScan::ConstPtr & | laser, |
| double | xregion, | ||
| double | yregion, | ||
| int * | index_to_obstacle, | ||
| double * | distance_to_obstacle | ||
| ) |
Definition at line 59 of file kurt-freespace.cc.
Variable Documentation
| double max_rotational_vel |
Definition at line 11 of file kurt-freespace.cc.
| double max_vel_x |
Definition at line 11 of file kurt-freespace.cc.
Definition at line 12 of file kurt-freespace.cc.