Include dependency graph for example.cpp:
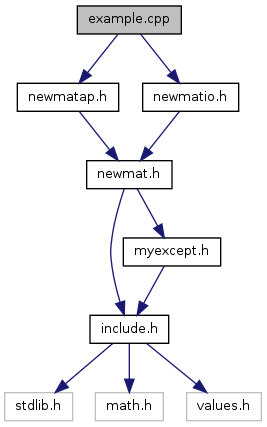
Go to the source code of this file.
| #define | WANT_STREAM |
| #define | WANT_MATH |
| void | test1 (Real *y, Real *x1, Real *x2, int nobs, int npred) |
| void | test2 (Real *y, Real *x1, Real *x2, int nobs, int npred) |
| void | test3 (Real *y, Real *x1, Real *x2, int nobs, int npred) |
| void | test4 (Real *y, Real *x1, Real *x2, int nobs, int npred) |
| void | test5 (Real *y, Real *x1, Real *x2, int nobs, int npred) |
| int | main () |
Define Documentation
| #define WANT_MATH |
Definition at line 12 of file example.cpp.
| #define WANT_STREAM |
Definition at line 11 of file example.cpp.
Function Documentation
| int main | ( | void | ) |
Definition at line 296 of file example.cpp.
Definition at line 27 of file example.cpp.
Definition at line 86 of file example.cpp.
Definition at line 165 of file example.cpp.
Definition at line 221 of file example.cpp.