#include <libusb.h>#include <ros/ros.h>#include <std_msgs/UInt8.h>#include <std_msgs/UInt16.h>#include <std_msgs/Float64.h>#include <sensor_msgs/Imu.h>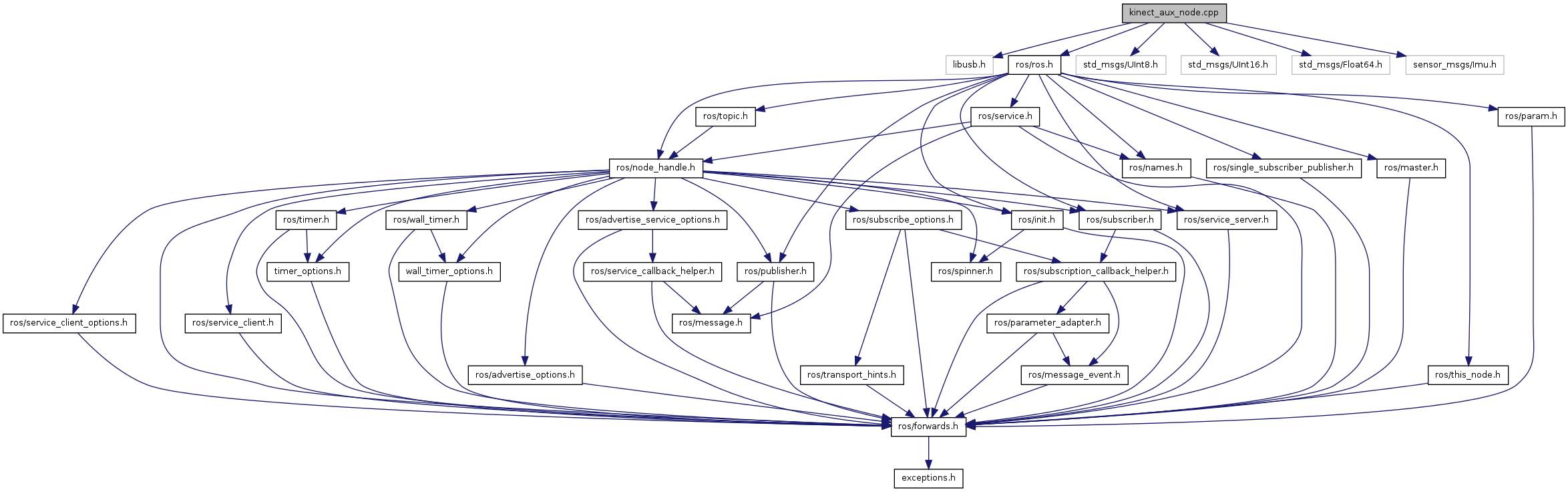
Go to the source code of this file.
Defines | |
| #define | FREENECT_COUNTS_PER_G 819. |
| #define | GRAVITY 9.80665 |
| #define | MAX_TILT_ANGLE 31. |
| #define | MIN_TILT_ANGLE (-31.) |
| #define | MS_MAGIC_MOTOR_PRODUCT 0x02b0 |
| #define | MS_MAGIC_VENDOR 0x45e |
Functions | |
| libusb_device_handle * | dev (0) |
| int | main (int argc, char *argv[]) |
| void | openAuxDevice (int index=0) |
| void | publishState (void) |
| void | setLedOption (const std_msgs::UInt16 optionMsg) |
| void | setTiltAngle (const std_msgs::Float64 angleMsg) |
Variables | |
| ros::Publisher | pub_imu |
| ros::Publisher | pub_tilt_angle |
| ros::Publisher | pub_tilt_status |
| ros::Subscriber | sub_led_option |
| ros::Subscriber | sub_tilt_angle |
Define Documentation
| #define FREENECT_COUNTS_PER_G 819. |
Definition at line 13 of file kinect_aux_node.cpp.
| #define GRAVITY 9.80665 |
Definition at line 12 of file kinect_aux_node.cpp.
| #define MAX_TILT_ANGLE 31. |
Definition at line 16 of file kinect_aux_node.cpp.
| #define MIN_TILT_ANGLE (-31.) |
Definition at line 17 of file kinect_aux_node.cpp.
| #define MS_MAGIC_MOTOR_PRODUCT 0x02b0 |
Definition at line 10 of file kinect_aux_node.cpp.
| #define MS_MAGIC_VENDOR 0x45e |
Definition at line 9 of file kinect_aux_node.cpp.
Function Documentation
| libusb_device_handle* dev | ( | 0 | ) |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 150 of file kinect_aux_node.cpp.
| void openAuxDevice | ( | int | index = 0 | ) |
Definition at line 28 of file kinect_aux_node.cpp.
| void publishState | ( | void | ) |
Definition at line 70 of file kinect_aux_node.cpp.
| void setLedOption | ( | const std_msgs::UInt16 | optionMsg | ) |
Definition at line 136 of file kinect_aux_node.cpp.
| void setTiltAngle | ( | const std_msgs::Float64 | angleMsg | ) |
Definition at line 121 of file kinect_aux_node.cpp.
Variable Documentation
Definition at line 19 of file kinect_aux_node.cpp.
Definition at line 20 of file kinect_aux_node.cpp.
Definition at line 21 of file kinect_aux_node.cpp.
Definition at line 24 of file kinect_aux_node.cpp.
Definition at line 23 of file kinect_aux_node.cpp.