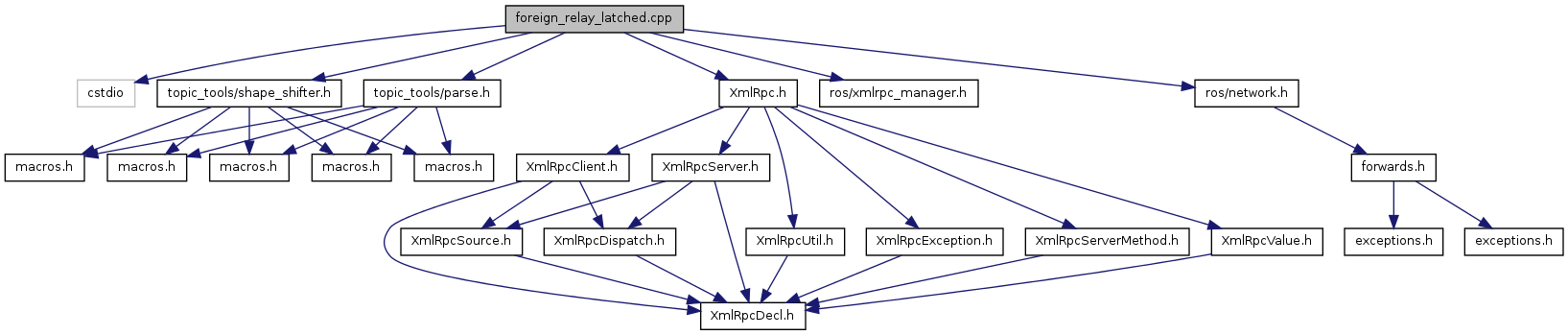
#include <cstdio>#include "topic_tools/shape_shifter.h"#include "topic_tools/parse.h"#include "XmlRpc.h"#include "ros/xmlrpc_manager.h"#include "ros/network.h"
Include dependency graph for foreign_relay_latched.cpp:
Go to the source code of this file.
Functions | |
| void | foreign_advertise (const std::string &type) |
| void | foreign_unadvertise () |
| void | in_cb (const boost::shared_ptr< ShapeShifter const > &msg) |
| int | main (int argc, char **argv) |
Variables | |
| static bool | g_advertised = false |
| bool | g_error = false |
| static string | g_host |
| ros::NodeHandle * | g_node = NULL |
| static string | g_output_topic |
| uint32_t | g_port = 0 |
| static ros::Publisher | g_pub |
| ros::XMLRPCManagerPtr | g_xmlrpc_manager = ros::XMLRPCManager::instance() |
Function Documentation
| void foreign_advertise | ( | const std::string & | type | ) |
Definition at line 55 of file foreign_relay_latched.cpp.
| void foreign_unadvertise | ( | ) |
Definition at line 72 of file foreign_relay_latched.cpp.
| void in_cb | ( | const boost::shared_ptr< ShapeShifter const > & | msg | ) |
Definition at line 87 of file foreign_relay_latched.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 99 of file foreign_relay_latched.cpp.
Variable Documentation
bool g_advertised = false [static] |
Definition at line 46 of file foreign_relay_latched.cpp.
| bool g_error = false |
Definition at line 51 of file foreign_relay_latched.cpp.
string g_host [static] |
Definition at line 49 of file foreign_relay_latched.cpp.
| ros::NodeHandle* g_node = NULL |
Definition at line 45 of file foreign_relay_latched.cpp.
string g_output_topic [static] |
Definition at line 47 of file foreign_relay_latched.cpp.
| uint32_t g_port = 0 |
Definition at line 50 of file foreign_relay_latched.cpp.
ros::Publisher g_pub [static] |
Definition at line 48 of file foreign_relay_latched.cpp.
Definition at line 53 of file foreign_relay_latched.cpp.