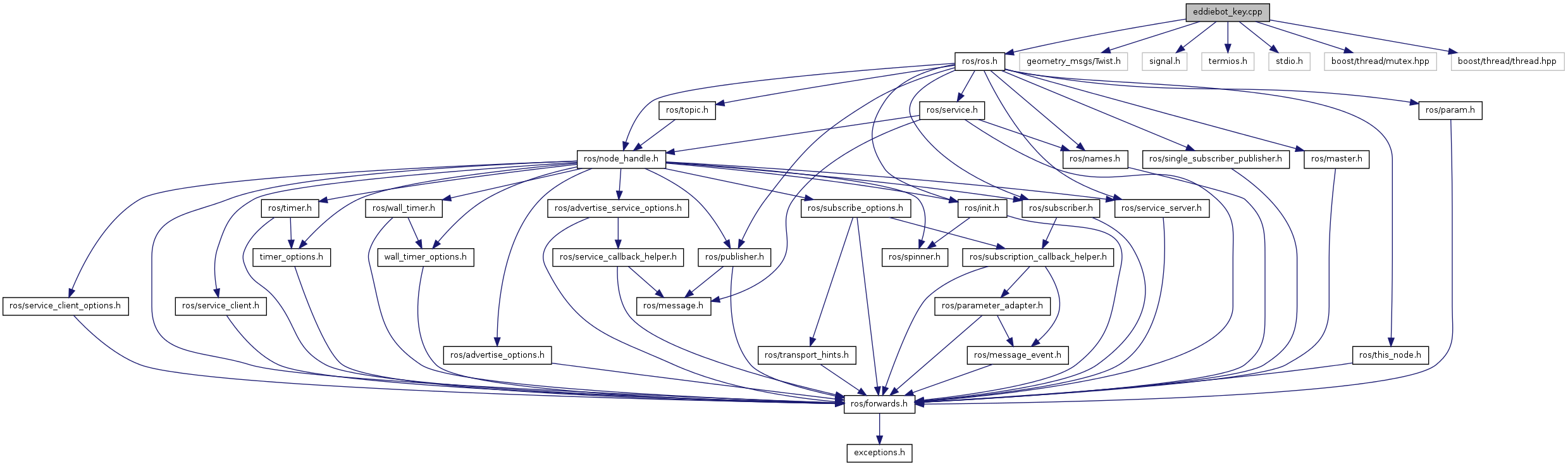
#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <signal.h>#include <termios.h>#include <stdio.h>#include "boost/thread/mutex.hpp"#include "boost/thread/thread.hpp"
Include dependency graph for eddiebot_key.cpp:
Go to the source code of this file.
Classes | |
| class | EddiebotTeleop |
Defines | |
| #define | KEYCODE_D 0x42 |
| #define | KEYCODE_L 0x44 |
| #define | KEYCODE_Q 0x71 |
| #define | KEYCODE_R 0x43 |
| #define | KEYCODE_U 0x41 |
Functions | |
| int | main (int argc, char **argv) |
| void | quit (int sig) |
Variables | |
| int | kfd = 0 |
| struct termios cooked | raw |
Define Documentation
| #define KEYCODE_D 0x42 |
Definition at line 41 of file eddiebot_key.cpp.
| #define KEYCODE_L 0x44 |
Definition at line 39 of file eddiebot_key.cpp.
| #define KEYCODE_Q 0x71 |
Definition at line 42 of file eddiebot_key.cpp.
| #define KEYCODE_R 0x43 |
Definition at line 38 of file eddiebot_key.cpp.
| #define KEYCODE_U 0x41 |
Definition at line 40 of file eddiebot_key.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 89 of file eddiebot_key.cpp.
| void quit | ( | int | sig | ) |
Definition at line 81 of file eddiebot_key.cpp.
Variable Documentation
| int kfd = 0 |
Definition at line 78 of file eddiebot_key.cpp.
| struct termios cooked raw |
Definition at line 79 of file eddiebot_key.cpp.