Public Member Functions | |
| def | __init__ |
| def | initialize |
| def | process_command |
| def | process_motor_states |
| def | process_set_compliance_margin |
| def | process_set_compliance_punch |
| def | process_set_compliance_slope |
| def | process_set_speed |
| def | process_set_torque_limit |
| def | process_torque_enable |
| def | rad_to_raw |
| def | raw_to_rad |
| def | set_compliance_margin |
| def | set_compliance_punch |
| def | set_compliance_slope |
| def | set_speed |
| def | set_torque_enable |
| def | set_torque_limit |
| def | start |
| def | stop |
Public Attributes | |
| command_sub | |
| compliance_margin | |
| compliance_marigin_service | |
| compliance_punch | |
| compliance_punch_service | |
| compliance_slope | |
| compliance_slope_service | |
| controller_namespace | |
| dxl_io | |
| joint_name | |
| joint_speed | |
| joint_state_pub | |
| motor_states_sub | |
| port_namespace | |
| running | |
| speed_service | |
| torque_limit | |
| torque_limit_service | |
| torque_service | |
Private Member Functions | |
| def | __ensure_limits |
Detailed Description
Definition at line 61 of file joint_controller.py.
Constructor & Destructor Documentation
| def dynamixel_controllers.joint_controller.JointController.__init__ | ( | self, | |
| dxl_io, | |||
| controller_namespace, | |||
| port_namespace | |||
| ) |
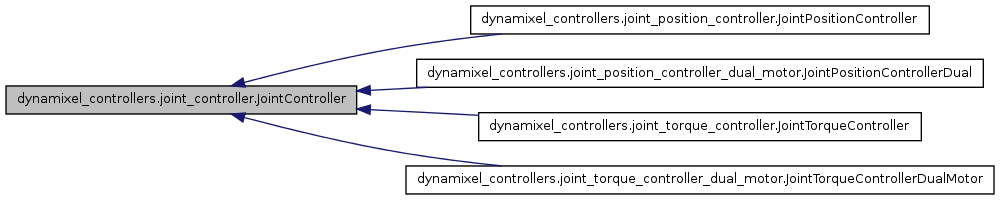
Reimplemented in dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_torque_controller.JointTorqueController, and dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor.
Definition at line 62 of file joint_controller.py.
Member Function Documentation
| def dynamixel_controllers.joint_controller.JointController.__ensure_limits | ( | self | ) | [private] |
Definition at line 83 of file joint_controller.py.
Reimplemented in dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 103 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.process_command | ( | self, | |
| msg | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, dynamixel_controllers.joint_position_controller.JointPositionController, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 166 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.process_motor_states | ( | self, | |
| state_list | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 163 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.process_set_compliance_margin | ( | self, | |
| req | |||
| ) |
Definition at line 151 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.process_set_compliance_punch | ( | self, | |
| req | |||
| ) |
Definition at line 155 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.process_set_compliance_slope | ( | self, | |
| req | |||
| ) |
Definition at line 147 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.process_set_speed | ( | self, | |
| req | |||
| ) |
Definition at line 139 of file joint_controller.py.
Definition at line 159 of file joint_controller.py.
Definition at line 143 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.rad_to_raw | ( | self, | |
| angle, | |||
| initial_position_raw, | |||
| flipped, | |||
| encoder_ticks_per_radian | |||
| ) |
angle is in radians
Definition at line 169 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.raw_to_rad | ( | self, | |
| raw, | |||
| initial_position_raw, | |||
| flipped, | |||
| radians_per_encoder_tick | |||
| ) |
Definition at line 176 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.set_compliance_margin | ( | self, | |
| margin | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 130 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.set_compliance_punch | ( | self, | |
| punch | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 133 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.set_compliance_slope | ( | self, | |
| slope | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 127 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.set_speed | ( | self, | |
| speed | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_torque_controller.JointTorqueController, and dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor.
Definition at line 124 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.set_torque_enable | ( | self, | |
| torque_enable | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_torque_controller.JointTorqueController, and dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor.
Definition at line 121 of file joint_controller.py.
| def dynamixel_controllers.joint_controller.JointController.set_torque_limit | ( | self, | |
| max_torque | |||
| ) |
Reimplemented in dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, dynamixel_controllers.joint_position_controller.JointPositionController, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 136 of file joint_controller.py.
Definition at line 106 of file joint_controller.py.
Definition at line 112 of file joint_controller.py.
Member Data Documentation
Definition at line 106 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Reimplemented in dynamixel_controllers.joint_position_controller.JointPositionController, dynamixel_controllers.joint_position_controller_dual_motor.JointPositionControllerDual, dynamixel_controllers.joint_torque_controller_dual_motor.JointTorqueControllerDualMotor, and dynamixel_controllers.joint_torque_controller.JointTorqueController.
Definition at line 62 of file joint_controller.py.
Definition at line 106 of file joint_controller.py.
Definition at line 106 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
Definition at line 62 of file joint_controller.py.
The documentation for this class was generated from the following file: