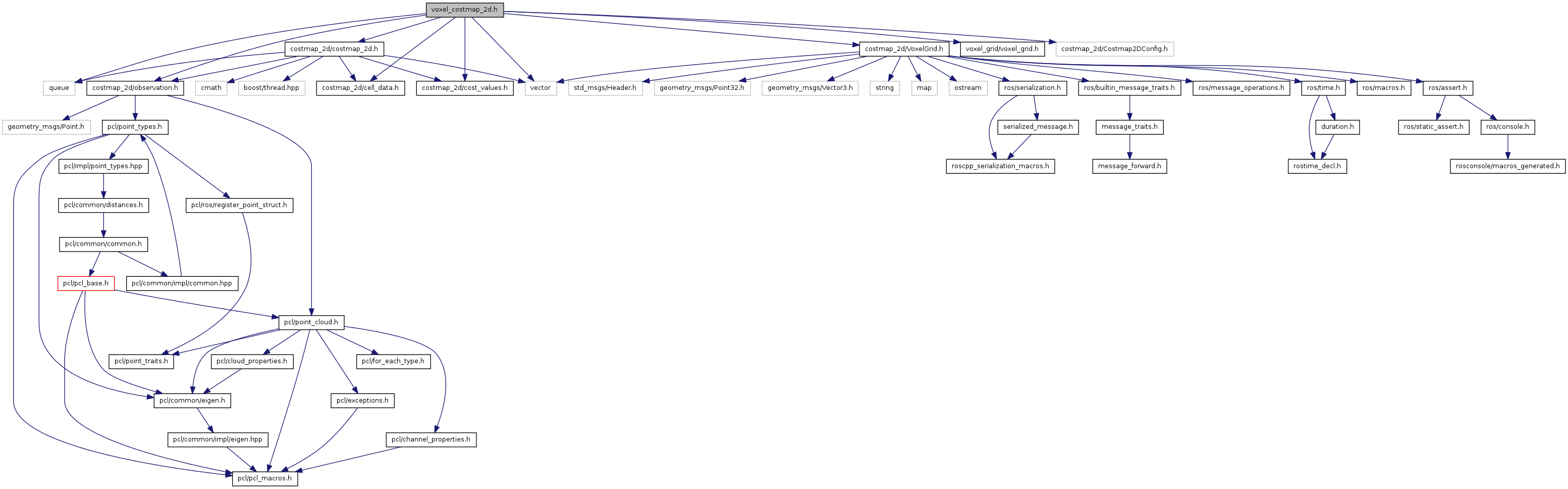
#include <vector>#include <queue>#include <costmap_2d/costmap_2d.h>#include <costmap_2d/observation.h>#include <costmap_2d/cell_data.h>#include <costmap_2d/cost_values.h>#include <voxel_grid/voxel_grid.h>#include <costmap_2d/VoxelGrid.h>#include <costmap_2d/Costmap2DConfig.h>
Include dependency graph for voxel_costmap_2d.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | costmap_2d::VoxelCostmap2D |
| A 2D costmap provides a mapping between points in the world and their associated "costs". More... | |
Namespaces | |
| namespace | costmap_2d |