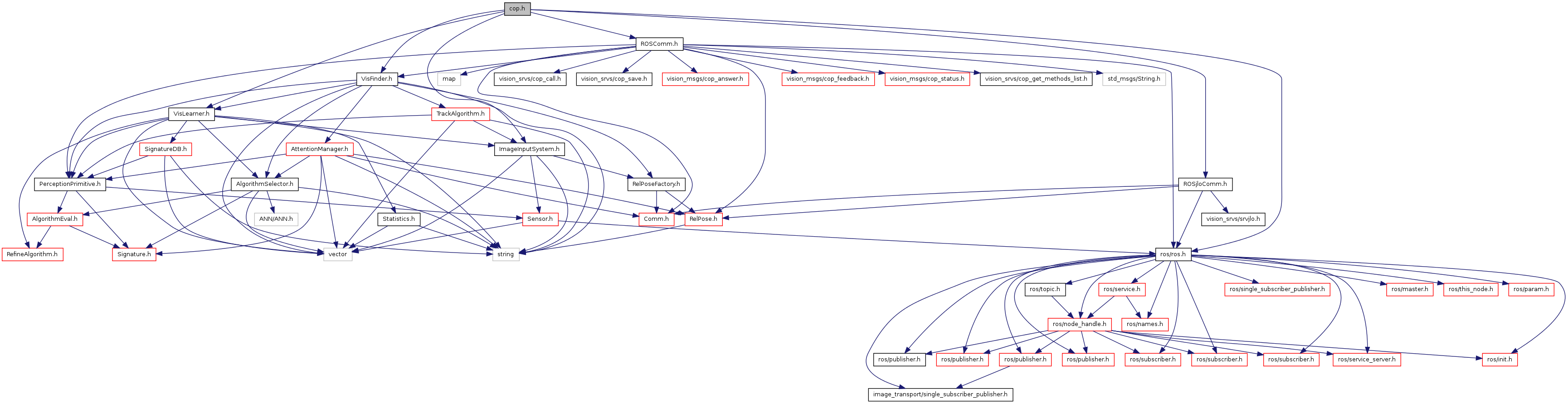
#include "VisFinder.h"#include "VisLearner.h"#include "ImageInputSystem.h"#include "ROSComm.h"#include "ROSjloComm.h"#include <ros/ros.h>
Include dependency graph for cop.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cop::cop_world |
| Loads an initial state for the framework from an xml file. More... | |
Namespaces | |
| namespace | cop |
all functionality of the project cognitive perception is in the cop namespace Have a closer look to the interfaces that are provided by cognitive_perception: | |
Defines | |
| #define | BOOST(A) |
| #define | DEBUG(A) ; |
| #define | LOGFILE_ADDED |
Functions | |
| void | COPCTRLC (int) |
Variables | |
| volatile bool | g_stopall = false |
Define Documentation
| #define LOGFILE_ADDED |
Function Documentation
| void COPCTRLC | ( | int | ) |
USE_YARP_COMM NO_LO_SERVICE_AVAILABLE NO_LO_SERVICE_AVAILABLE USE_YARP_COMM
Definition at line 28 of file ImageInputSystem.cpp.