Specialisation of algoithms that return a 3d position as an result. More...
#include <LocateAlgorithm.h>
Public Member Functions | |
| virtual double | CheckSignature (const Signature &object, const std::vector< Sensor * > &sensors) |
| evaluate shortly of the signature contains necessary model information to perform the algorithm | |
| LocateAlgorithm () | |
| virtual std::vector< RelPose * > | Perform (std::vector< Sensor * > sensors, RelPose *pose, Signature &Object, int &numOfObjects, double &qualityMeasure)=0 |
| the function that is called to execute this current algorithm | |
| virtual XMLTag * | Save ()=0 |
| saves the algorithms name and a parameter set | |
| virtual void | SetData (XMLTag *tag) |
| virtual bool | TrackingPossible (const Reading &img, const Signature &sig, RelPose *pose) |
| virtual | ~LocateAlgorithm () |
Static Public Member Functions | |
| static LocateAlgorithm * | LocAlgFactory (XMLTag *tag) |
Detailed Description
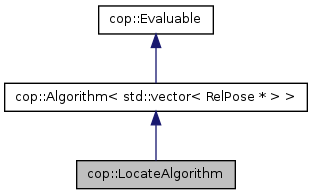
Specialisation of algoithms that return a 3d position as an result.
class LocateAlgorithm
Definition at line 40 of file LocateAlgorithm.h.
Constructor & Destructor Documentation
| cop::LocateAlgorithm::LocateAlgorithm | ( | ) | [inline] |
Constructor
Definition at line 52 of file LocateAlgorithm.h.
| virtual cop::LocateAlgorithm::~LocateAlgorithm | ( | ) | [inline, virtual] |
Destructor
Definition at line 57 of file LocateAlgorithm.h.
Member Function Documentation
| virtual double cop::LocateAlgorithm::CheckSignature | ( | const Signature & | object, |
| const std::vector< Sensor * > & | sensors | ||
| ) | [inline, virtual] |
evaluate shortly of the signature contains necessary model information to perform the algorithm
CheckSignature
- Parameters:
-
object the signature that has to be checked sensors a list of available sensors seeing the target area
- Returns:
- an evaluation from 0 to 1: 1 saying that there is all needed information , 0 saying it is impossible to perform the algorithm, everything in between says that it will take longer or will be inaccurate
Implements cop::Evaluable.
Definition at line 69 of file LocateAlgorithm.h.
| LocateAlgorithm * LocateAlgorithm::LocAlgFactory | ( | XMLTag * | tag | ) | [static] |
Definition at line 40 of file LocateAlgorithm.cpp.
| virtual std::vector<RelPose*> cop::LocateAlgorithm::Perform | ( | std::vector< Sensor * > | sensors, |
| RelPose * | pose, | ||
| Signature & | Object, | ||
| int & | numOfObjects, | ||
| double & | qualityMeasure | ||
| ) | [pure virtual] |
the function that is called to execute this current algorithm
Perform
- Parameters:
-
cam list of cameras available for locating pose current pose hypothesis that could be used for search space restriction Object Description of the object to search for and the receiver of information updates numOfObjects number of objects that should be found and on return that were found
Implements cop::Algorithm< std::vector< RelPose * > >.
| virtual XMLTag* cop::LocateAlgorithm::Save | ( | ) | [pure virtual] |
| virtual void cop::LocateAlgorithm::SetData | ( | XMLTag * | tag | ) | [inline, virtual] |
Definition at line 73 of file LocateAlgorithm.h.
| bool LocateAlgorithm::TrackingPossible | ( | const Reading & | img, |
| const Signature & | sig, | ||
| RelPose * | pose | ||
| ) | [virtual] |
Definition at line 60 of file LocateAlgorithm.cpp.
The documentation for this class was generated from the following files: