
Go to the source code of this file.
Classes | |
| class | Animatics |
Enumerations | |
| enum | brake_status_t { Status_Bt = 0x0001, Status_Br = 0x0002, Status_Bl = 0x0004, Status_Bi = 0x0008, Status_Bw = 0x0010, Status_Be = 0x0020, Status_Bh = 0x0040, Status_Bo = 0x0080, Status_Bx = 0x0100, Status_Bp = 0x0200, Status_Bm = 0x0400, Status_Bd = 0x0800, Status_Bu = 0x1000, Status_Bs = 0x2000, Status_Ba = 0x4000, Status_Bk = 0x8000 } |
Functions | |
| static float | limit_travel (float position) |
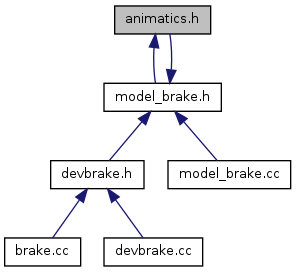
ART brake servo controller Animatics Smart Motor interface
Definition in file animatics.h.
| enum brake_status_t |
| Status_Bt | |
| Status_Br | |
| Status_Bl | |
| Status_Bi | |
| Status_Bw | |
| Status_Be | |
| Status_Bh | |
| Status_Bo | |
| Status_Bx | |
| Status_Bp | |
| Status_Bm | |
| Status_Bd | |
| Status_Bu | |
| Status_Bs | |
| Status_Ba | |
| Status_Bk |
Definition at line 28 of file animatics.h.
| static float limit_travel | ( | float | position | ) | [inline, static] |
Definition at line 127 of file animatics.h.

