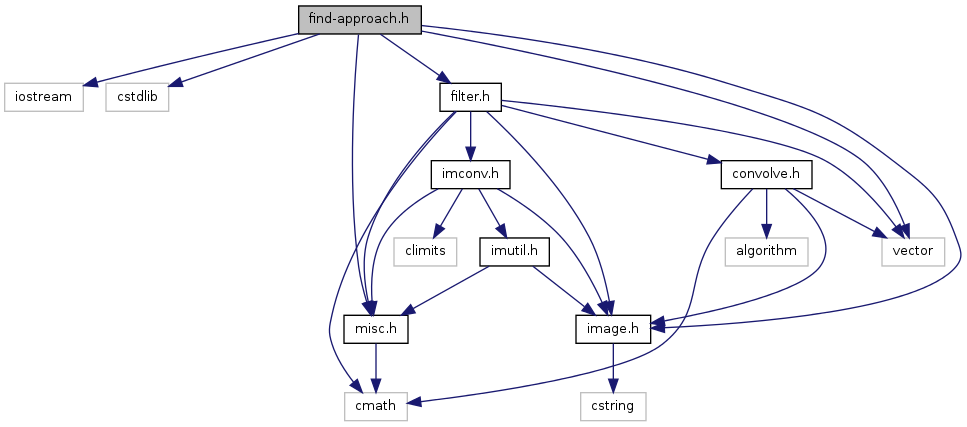
#include <iostream>#include <cstdlib>#include <image.h>#include <misc.h>#include <filter.h>#include <vector>
Include dependency graph for find-approach.h:
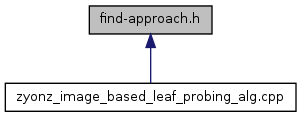
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Defines | |
| #define | PI 3.14159265 |
Functions | |
| double * | find_approach (int **clusters, image< rgb > *pc, double *goal_parameters, double **trans_params, int *model_probing_point) |
| void | TransformPoint (const int pointX, const int pointY, const double *current_trans, const double m_x, const double m_y, double *transformed_edge_point) |
Define Documentation
| #define PI 3.14159265 |
Definition at line 17 of file find-approach.h.
Function Documentation
| double* find_approach | ( | int ** | clusters, |
| image< rgb > * | pc, | ||
| double * | goal_parameters, | ||
| double ** | trans_params, | ||
| int * | model_probing_point | ||
| ) |
Definition at line 41 of file find-approach.h.
| void TransformPoint | ( | const int | pointX, |
| const int | pointY, | ||
| const double * | current_trans, | ||
| const double | m_x, | ||
| const double | m_y, | ||
| double * | transformed_edge_point | ||
| ) |
Definition at line 21 of file find-approach.h.