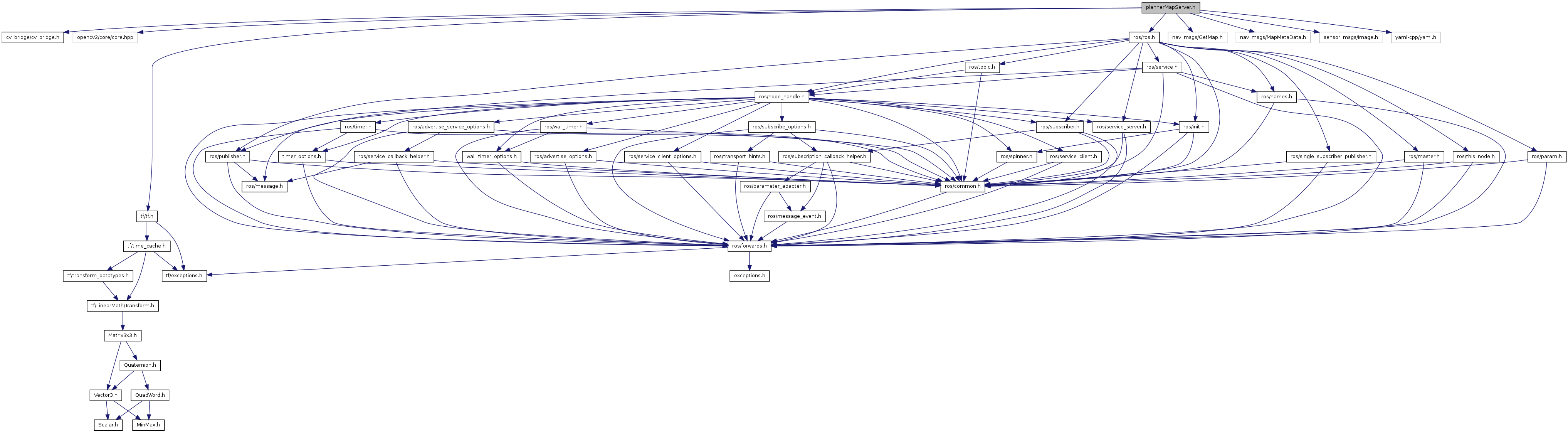
#include <cv_bridge/cv_bridge.h>#include <opencv2/core/core.hpp>#include <tf/tf.h>#include <nav_msgs/GetMap.h>#include <nav_msgs/MapMetaData.h>#include <ros/ros.h>#include <sensor_msgs/Image.h>#include <yaml-cpp/yaml.h>
Include dependency graph for plannerMapServer.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | plannerMapServer |
| loads and updates a map from an overhead camera More... | |
Defines | |
| #define | MAP_IDX(sx, i, j) ((sx) * (j) + (i)) |
Define Documentation
| #define MAP_IDX | ( | sx, | |
| i, | |||
| j | |||
| ) | ((sx) * (j) + (i)) |
This file contains a modification of the map_server class written by Brian Gerkey from the ROS navigation stack to work with dynamic overhead maps.
Definition at line 48 of file plannerMapServer.h.