ROS class for detecting obstacles in a point cloud. More...
#include <velodyne_height_map/heightmap.h>
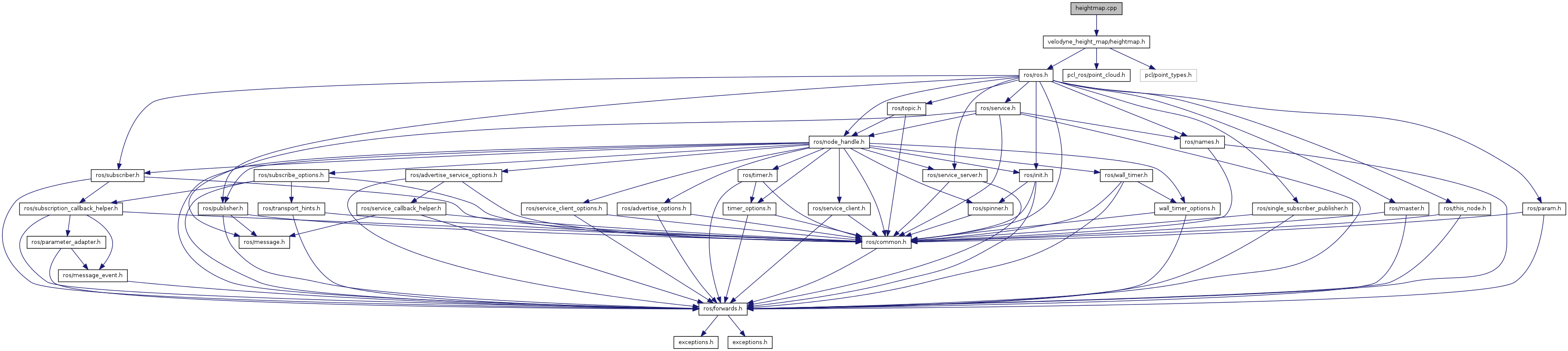
Include dependency graph for heightmap.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | velodyne_height_map |
Defines | |
| #define | MAX(x, y) ((x) > (y) ? (x) : (y)) |
| #define | MIN(x, y) ((x) < (y) ? (x) : (y)) |
Detailed Description
ROS class for detecting obstacles in a point cloud.
This class produces a point cloud containing all points that lie on an obstacle and are taller than the height_threshold parameter.
Subscribes:
- velodyne_points [sensor_msgs::PointCloud2] data from one revolution of the Velodyne LIDAR
Publishes:
- veloydne_obstacles [sensor_msgs::PointCloud2] grid cells that contain an obstacle
- veloydne_clear [sensor_msgs::PointCloud2] grid cells with no obstacles
Definition in file heightmap.cpp.
Define Documentation
| #define MAX | ( | x, | |
| y | |||
| ) | ((x) > (y) ? (x) : (y)) |
Definition at line 38 of file heightmap.cpp.
| #define MIN | ( | x, | |
| y | |||
| ) | ((x) < (y) ? (x) : (y)) |
Definition at line 37 of file heightmap.cpp.