#include <string>#include <sstream>#include <iostream>#include <unistd.h>#include "ros/ros.h"#include <ros/transport_hints.h>#include <stdio.h>#include <SystemConfig.h>#include <Configuration.h>#include <exception>#include <boost/asio.hpp>#include <boost/thread.hpp>#include <sys/ioctl.h>#include <net/if.h>#include <netinet/in.h>#include <arpa/inet.h>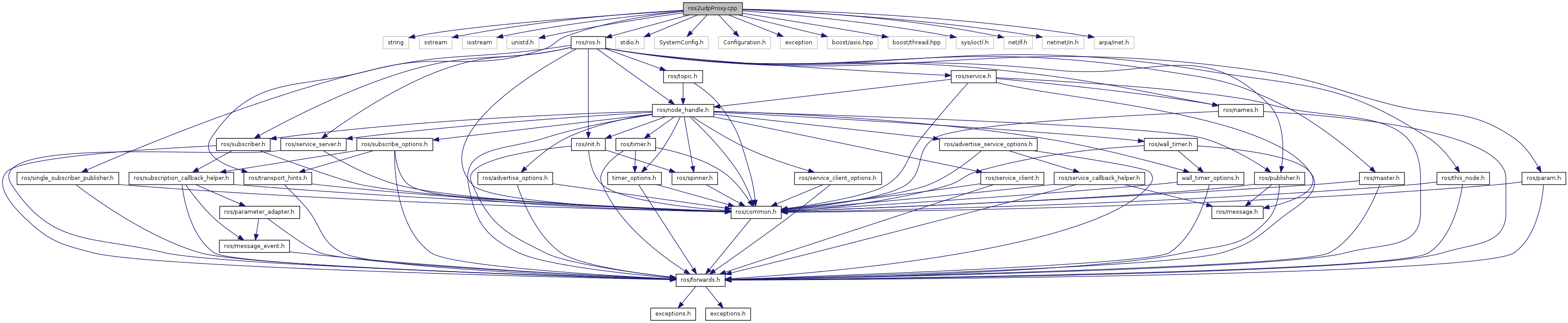
Go to the source code of this file.
Functions | |
| void | handleUdpPacket (const boost::system::error_code &error, std::size_t bytes_transferred) |
| void | listenForPacket () |
| int | main (int argc, char *argv[]) |
| void | run () |
Variables | |
| udp::endpoint | destEndPoint |
| <?rosMessageHandler?> <?rosPublisherDecl?> boost::array< char, 64000 > | inBuffer |
| udp::socket * | insocket |
| boost::asio::io_service | io_service |
| boost::asio::ip::address | multiCastAddress |
| udp::endpoint | otherEndPoint |
| std::string | ownRosName |
| void handleUdpPacket | ( | const boost::system::error_code & | error, |
| std::size_t | bytes_transferred | ||
| ) |
Definition at line 54 of file ros2udpProxy.cpp.
| void listenForPacket | ( | ) |
Definition at line 50 of file ros2udpProxy.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 80 of file ros2udpProxy.cpp.
| void run | ( | ) |
Definition at line 76 of file ros2udpProxy.cpp.
| udp::endpoint destEndPoint |
Definition at line 37 of file ros2udpProxy.cpp.
| <?rosMessageHandler?><?rosPublisherDecl?> boost::array<char,64000> inBuffer |
Definition at line 49 of file ros2udpProxy.cpp.
| udp::socket* insocket |
Definition at line 35 of file ros2udpProxy.cpp.
Definition at line 39 of file ros2udpProxy.cpp.
| boost::asio::ip::address multiCastAddress |
Definition at line 38 of file ros2udpProxy.cpp.
| udp::endpoint otherEndPoint |
Definition at line 36 of file ros2udpProxy.cpp.
| std::string ownRosName |
Definition at line 34 of file ros2udpProxy.cpp.

