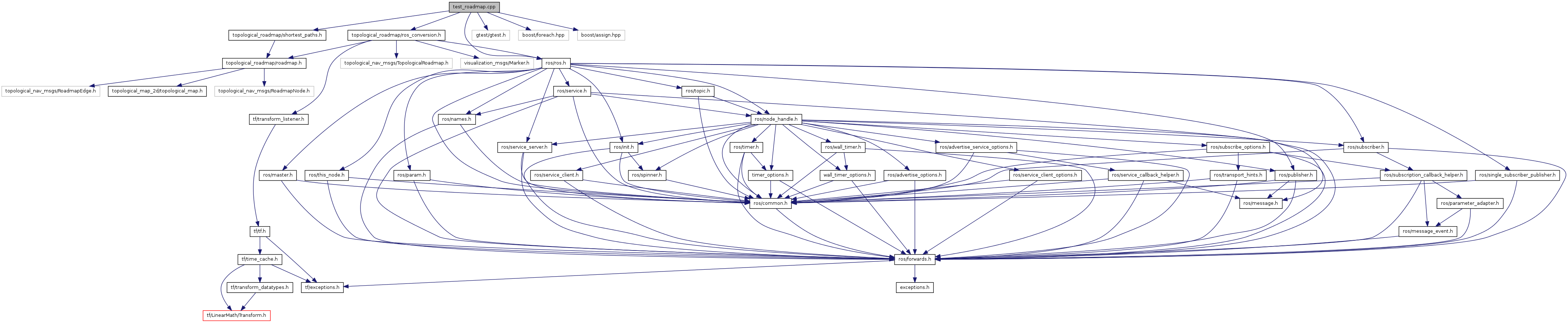
#include <topological_roadmap/shortest_paths.h>#include <topological_roadmap/ros_conversion.h>#include <ros/ros.h>#include <gtest/gtest.h>#include <boost/foreach.hpp>#include <boost/assign.hpp>
Include dependency graph for test_roadmap.cpp:
Go to the source code of this file.
Functions | |
| unsigned | addEdge (rm::Roadmap *r, const unsigned n1, const unsigned n2, const unsigned grid, const double cost) |
| unsigned | addNode (rm::Roadmap *r, const unsigned grid) |
| int | main (int argc, char **argv) |
| template<class T > | |
| ostream & | operator<< (ostream &str, const vector< T > &s) |
| TEST (topological_roadmap, RoadmapTest) | |
Detailed Description
Tests for topological_roadmap
Definition in file test_roadmap.cpp.
Function Documentation
| unsigned addEdge | ( | rm::Roadmap * | r, |
| const unsigned | n1, | ||
| const unsigned | n2, | ||
| const unsigned | grid, | ||
| const double | cost | ||
| ) |
Definition at line 72 of file test_roadmap.cpp.
| unsigned addNode | ( | rm::Roadmap * | r, |
| const unsigned | grid | ||
| ) |
Definition at line 62 of file test_roadmap.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 132 of file test_roadmap.cpp.
template<class T >
| ostream& operator<< | ( | ostream & | str, |
| const vector< T > & | s | ||
| ) |
Definition at line 56 of file test_roadmap.cpp.
| TEST | ( | topological_roadmap | , |
| RoadmapTest | |||
| ) |
Definition at line 85 of file test_roadmap.cpp.