#include <telekyb_base/TeleKyb.hpp>#include <telekyb_base/Options.hpp>#include "SerialIMUDevice.hpp"#include "IMUDataProcessor.hpp"#include "SmurfInterfaceOptions.hpp"#include "SerialCommandDevice.hpp"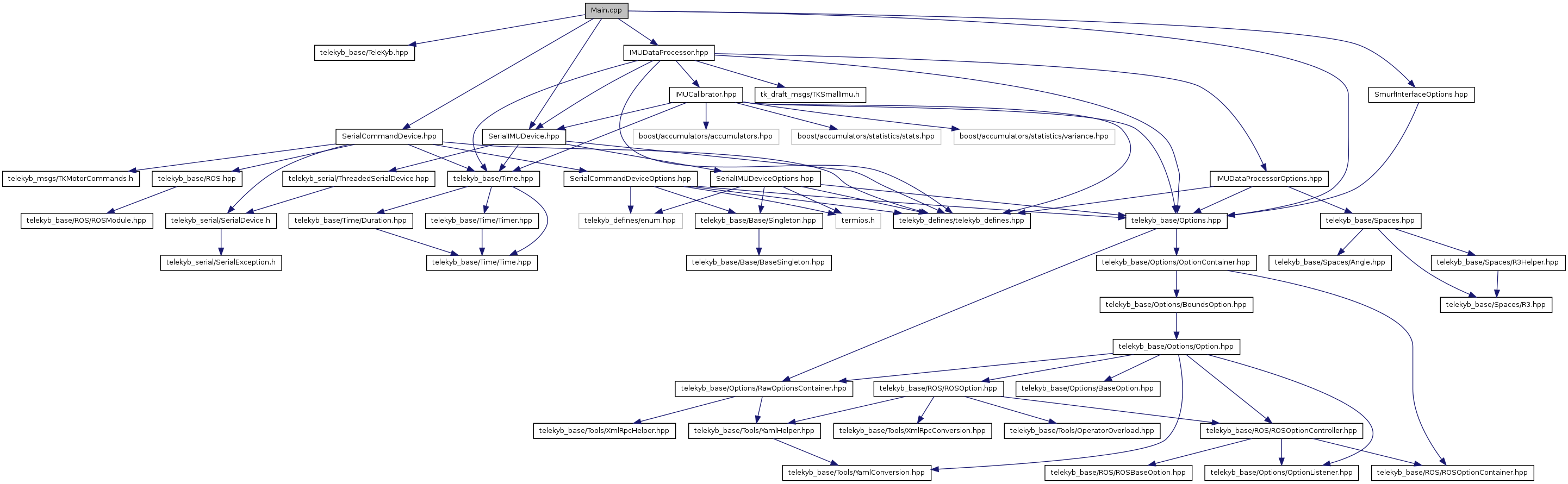
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |

