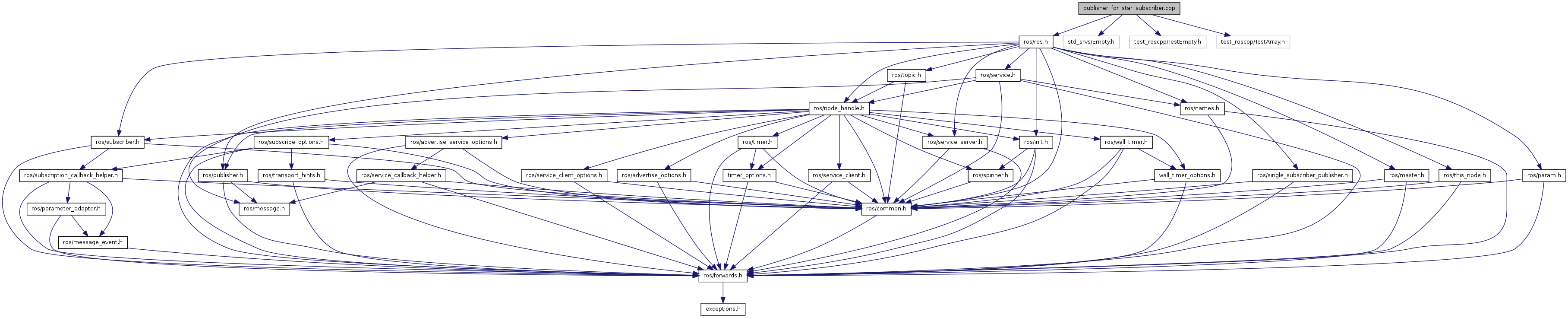
#include <ros/ros.h>#include <std_srvs/Empty.h>#include <test_roscpp/TestEmpty.h>#include <test_roscpp/TestArray.h>
Include dependency graph for publisher_for_star_subscriber.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| void | pubTimer (const ros::TimerEvent &) |
| bool | switchPublisherType (std_srvs::EmptyRequest &, std_srvs::EmptyResponse &) |
Variables | |
| ros::Publisher | g_pub |
| int8_t | type = 0 |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 64 of file publisher_for_star_subscriber.cpp.
| void pubTimer | ( | const ros::TimerEvent & | ) |
Definition at line 59 of file publisher_for_star_subscriber.cpp.
| bool switchPublisherType | ( | std_srvs::EmptyRequest & | , |
| std_srvs::EmptyResponse & | |||
| ) |
Definition at line 42 of file publisher_for_star_subscriber.cpp.
Variable Documentation
Definition at line 39 of file publisher_for_star_subscriber.cpp.
| int8_t type = 0 |
Definition at line 40 of file publisher_for_star_subscriber.cpp.