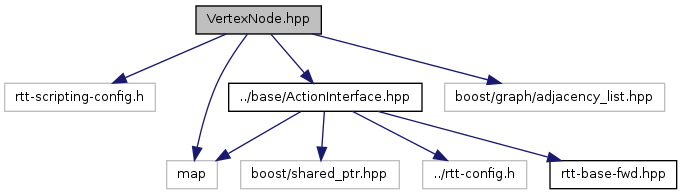
#include "rtt-scripting-config.h"#include <map>#include "../base/ActionInterface.hpp"#include <boost/graph/adjacency_list.hpp>
Include dependency graph for VertexNode.hpp:
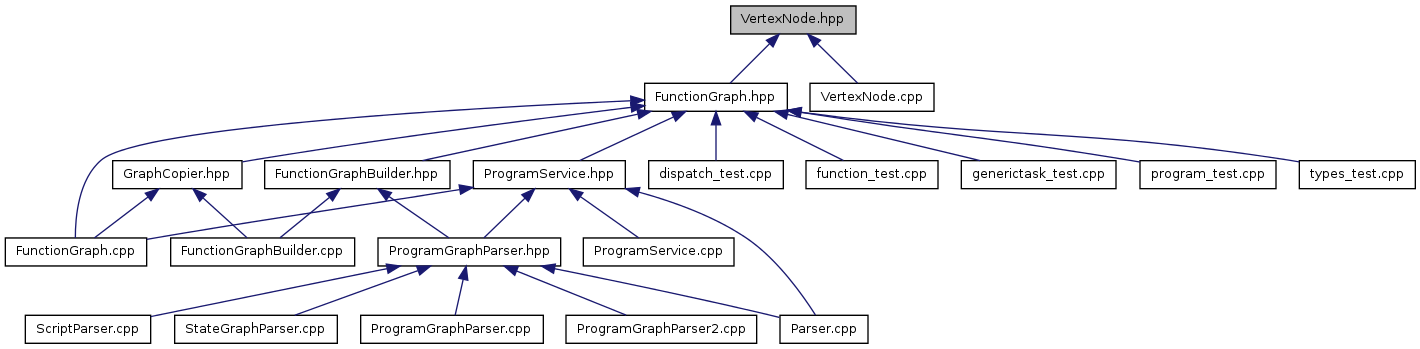
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RTT::scripting::VertexNode |
Namespaces | |
| namespace | boost |
| namespace | RTT |
Contains TaskContext, Activity, OperationCaller, Operation, Property, InputPort, OutputPort, Attribute. | |
| namespace | RTT::scripting |
Defines | |
| #define | BOOST_NO_HASH |
Enumerations | |
| enum | RTT::scripting::vertex_command_t { RTT::scripting::vertex_command } |
| enum | RTT::scripting::vertex_exec_t { RTT::scripting::vertex_exec } |
Functions | |
| boost::BOOST_INSTALL_PROPERTY (vertex, command) | |
| boost::BOOST_INSTALL_PROPERTY (vertex, exec) | |
Define Documentation
| #define BOOST_NO_HASH |
Definition at line 54 of file VertexNode.hpp.