Allows for control of the Rovio with a joystick. More...
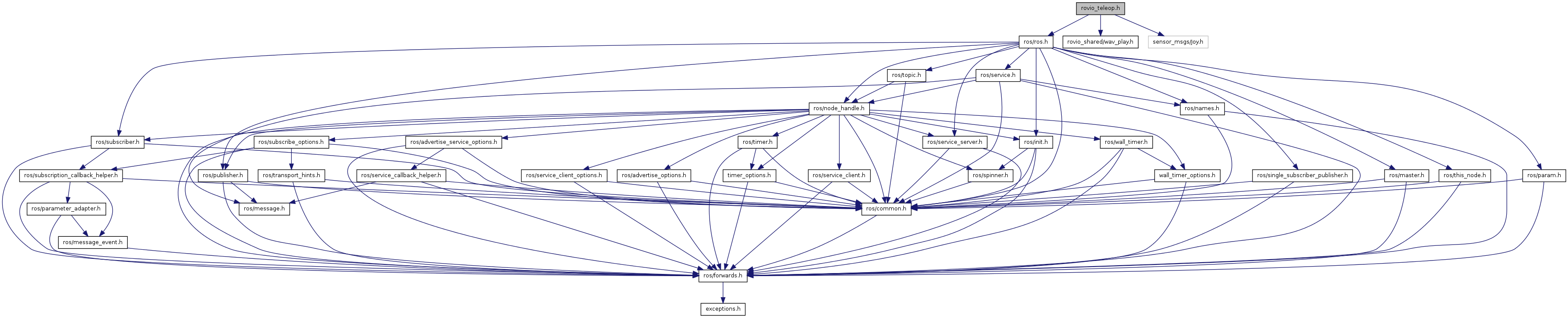
Include dependency graph for rovio_teleop.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | teleop_controller |
| Provides a bridge between the joy topic and the Rovio nodes. More... | |
Defines | |
| #define | ROVIO_WAV "/rovio_shared/rovio_wav" |
| #define | THROTTLE 0.66 |
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Allows for control of the Rovio with a joystick.
rovio_teleop creates a ROS node that allows the control of a Rovio with a joystick. This node listens to a joy topic and sends messages to the cmd_vel topic in the rovio_move node, head_ctrl service in the rovio_head node, and wav_play service in the rovio_audio node.
- Date:
- November 22, 2011
Definition in file rovio_teleop.h.
Define Documentation
| #define ROVIO_WAV "/rovio_shared/rovio_wav" |
The rovio_av wav directory location ROS parameter name
The speed throttle constant
| #define THROTTLE 0.66 |
Definition at line 66 of file rovio_teleop.h.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Creates and runs the rovio_teleop node.
- Parameters:
-
argc argument count that is passed to ros::init argv arguments that are passed to ros::init
- Returns:
- EXIT_SUCCESS if the node runs correctly
Creates and runs the rovio_head node.
- Parameters:
-
argc argument count that is passed to ros::init argv arguments that are passed to ros::init
- Returns:
- EXIT_SUCCESS if the node runs correctly
Definition at line 155 of file rovio_head.cpp.