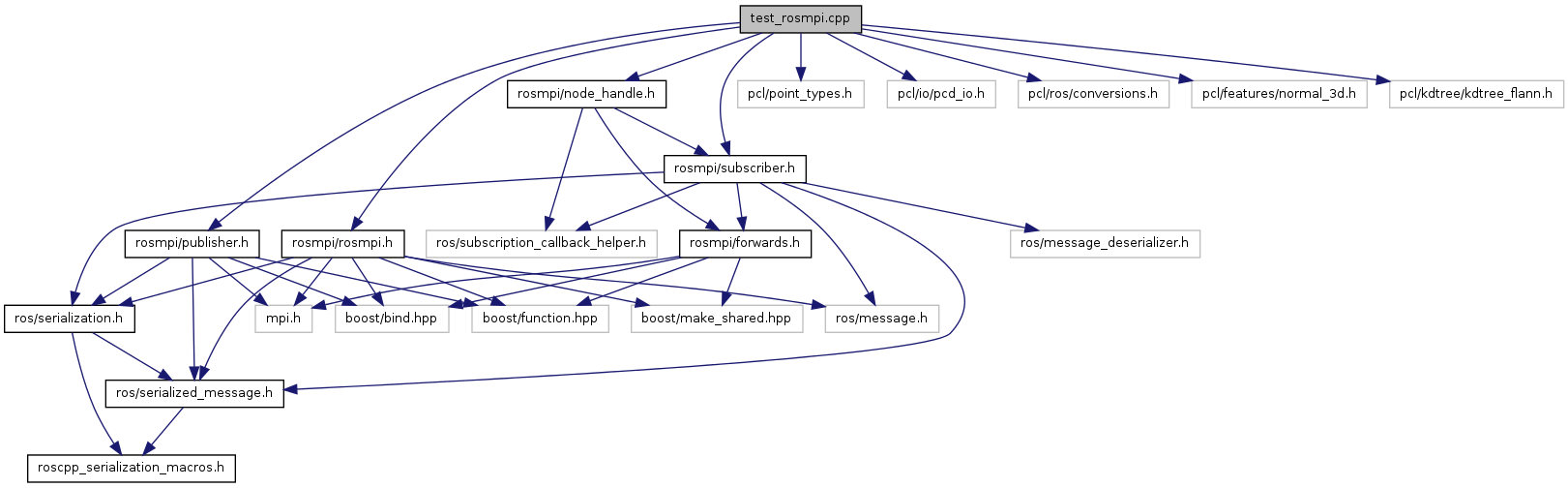
#include <rosmpi/rosmpi.h>#include <rosmpi/node_handle.h>#include <rosmpi/publisher.h>#include <rosmpi/subscriber.h>#include <pcl/point_types.h>#include <pcl/io/pcd_io.h>#include <pcl/ros/conversions.h>#include <pcl/features/normal_3d.h>#include <pcl/kdtree/kdtree_flann.h>
Include dependency graph for test_rosmpi.cpp:
Go to the source code of this file.
Classes | |
| class | Worker |
Typedefs | |
| typedef sensor_msgs::PointCloud2 | Msg |
| typedef sensor_msgs::PointCloud2::ConstPtr | MsgConstPtr |
Functions | |
| void | computeIndices (const int rank, const int max_rank, const int nr_points, pcl::PointIndices &indices) |
| int | main (int argc, char **argv) |
Variables | |
| std::string | processor_name |
| int | rank |
Typedef Documentation
| typedef sensor_msgs::PointCloud2 Msg |
Definition at line 49 of file test_rosmpi.cpp.
| typedef sensor_msgs::PointCloud2::ConstPtr MsgConstPtr |
Definition at line 50 of file test_rosmpi.cpp.
Function Documentation
| void computeIndices | ( | const int | rank, |
| const int | max_rank, | ||
| const int | nr_points, | ||
| pcl::PointIndices & | indices | ||
| ) |
Definition at line 56 of file test_rosmpi.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 111 of file test_rosmpi.cpp.
Variable Documentation
| std::string processor_name |
Definition at line 52 of file test_rosmpi.cpp.
| int rank |
Definition at line 53 of file test_rosmpi.cpp.