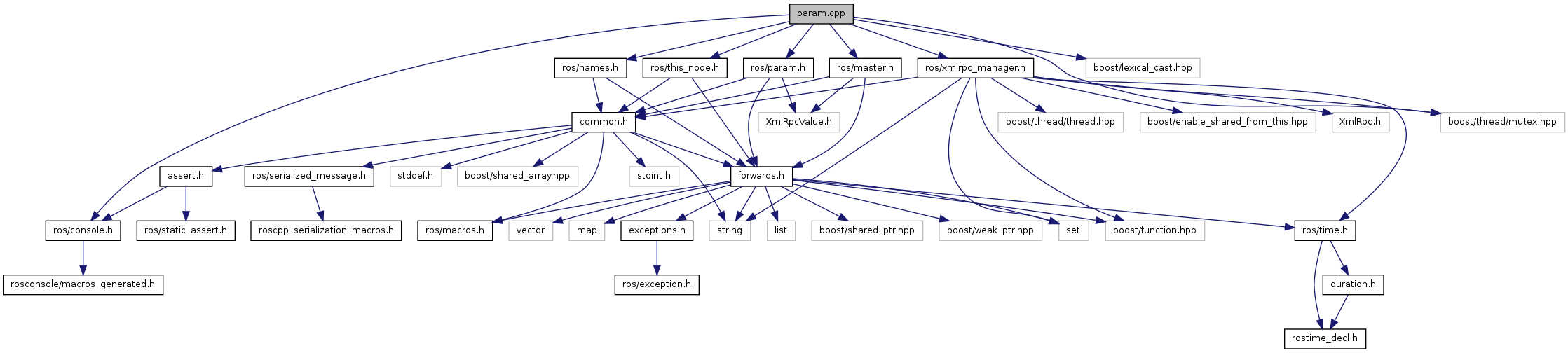
#include "ros/param.h"#include "ros/master.h"#include "ros/xmlrpc_manager.h"#include "ros/this_node.h"#include "ros/names.h"#include <ros/console.h>#include <boost/thread/mutex.hpp>#include <boost/lexical_cast.hpp>
Include dependency graph for param.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | ros |
| namespace | ros::param |
Contains functions which allow you to query the parameter server. | |
Typedefs | |
| typedef std::map< std::string, XmlRpc::XmlRpcValue > | ros::param::M_Param |
Functions | |
| ROSCPP_DECL bool | ros::param::del (const std::string &key) |
| Delete a parameter from the parameter server. | |
| ROSCPP_DECL bool | ros::param::get (const std::string &key, std::string &s) |
| Get a string value from the parameter server. | |
| ROSCPP_DECL bool | ros::param::get (const std::string &key, double &d) |
| Get a double value from the parameter server. | |
| ROSCPP_DECL bool | ros::param::get (const std::string &key, int &i) |
| Get a integer value from the parameter server. | |
| ROSCPP_DECL bool | ros::param::get (const std::string &key, bool &b) |
| Get a boolean value from the parameter server. | |
| ROSCPP_DECL bool | ros::param::get (const std::string &key, XmlRpc::XmlRpcValue &v) |
| Get an arbitrary XML/RPC value from the parameter server. | |
| ROSCPP_DECL bool | ros::param::getCached (const std::string &key, std::string &s) |
| Get a string value from the parameter server, with local caching. | |
| ROSCPP_DECL bool | ros::param::getCached (const std::string &key, double &d) |
| Get a double value from the parameter server, with local caching. | |
| ROSCPP_DECL bool | ros::param::getCached (const std::string &key, int &i) |
| Get a integer value from the parameter server, with local caching. | |
| ROSCPP_DECL bool | ros::param::getCached (const std::string &key, bool &b) |
| Get a boolean value from the parameter server, with local caching. | |
| ROSCPP_DECL bool | ros::param::getCached (const std::string &key, XmlRpc::XmlRpcValue &v) |
| Get an arbitrary XML/RPC value from the parameter server, with local caching. | |
| bool | ros::param::getImpl (const std::string &key, XmlRpc::XmlRpcValue &v, bool use_cache) |
| bool | ros::param::getImpl (const std::string &key, std::string &s, bool use_cache) |
| bool | ros::param::getImpl (const std::string &key, double &d, bool use_cache) |
| bool | ros::param::getImpl (const std::string &key, int &i, bool use_cache) |
| bool | ros::param::getImpl (const std::string &key, bool &b, bool use_cache) |
| ROSCPP_DECL bool | ros::param::has (const std::string &key) |
| Check whether a parameter exists on the parameter server. | |
| void | ros::param::init (const M_string &remappings) |
| void | ros::param::paramUpdateCallback (XmlRpc::XmlRpcValue ¶ms, XmlRpc::XmlRpcValue &result) |
| ROSCPP_DECL bool | ros::param::search (const std::string &ns, const std::string &key, std::string &result) |
| Search up the tree for a parameter with a given key. | |
| ROSCPP_DECL bool | ros::param::search (const std::string &key, std::string &result) |
| Search up the tree for a parameter with a given key. This version defaults to starting in the current node's name. | |
| ROSCPP_DECL void | ros::param::set (const std::string &key, const XmlRpc::XmlRpcValue &v) |
| Set an arbitrary XML/RPC value on the parameter server. | |
| ROSCPP_DECL void | ros::param::set (const std::string &key, const std::string &s) |
| Set a string value on the parameter server. | |
| ROSCPP_DECL void | ros::param::set (const std::string &key, const char *s) |
| Set a string value on the parameter server. | |
| ROSCPP_DECL void | ros::param::set (const std::string &key, double d) |
| Set a double value on the parameter server. | |
| ROSCPP_DECL void | ros::param::set (const std::string &key, int i) |
| Set a integer value on the parameter server. | |
| ROSCPP_DECL void | ros::param::set (const std::string &key, bool b) |
| Set a integer value on the parameter server. | |
| void | ros::param::update (const std::string &key, const XmlRpc::XmlRpcValue &v) |
Variables | |
| M_Param | ros::param::g_params |
| boost::mutex | ros::param::g_params_mutex |
| S_string | ros::param::g_subscribed_params |