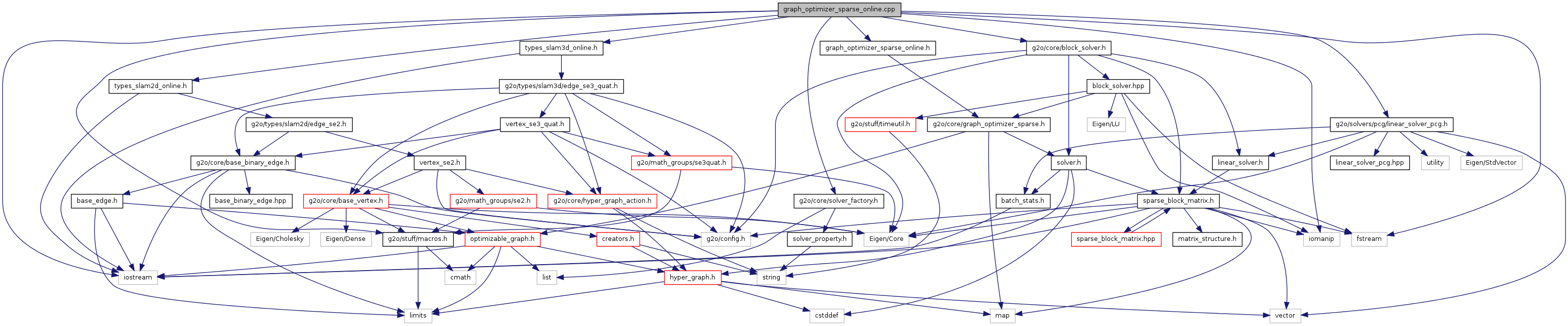
#include "types_slam2d_online.h"#include "types_slam3d_online.h"#include "graph_optimizer_sparse_online.h"#include "g2o/stuff/macros.h"#include "g2o/core/block_solver.h"#include "g2o/core/solver_factory.h"#include "g2o/solvers/pcg/linear_solver_pcg.h"#include <iostream>#include <iomanip>#include <fstream>
Include dependency graph for graph_optimizer_sparse_online.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | g2o |
Executes code, only if secs are gone since last exec. | |
Defines | |
| #define | ALLOC_PCG(s, p, l) |
| #define | DIM_TO_SOLVER(p, l) BlockSolver< BlockSolverTraits<p, l> > |
Functions | |
| static Solver * | g2o::createSolver (SparseOptimizer *opt, const std::string &solverName) |
Define Documentation
Value:
if (1) { \ std::cerr << "# Using PCG online poseDim " << p << " landMarkDim " << l << " blockordering 1" << std::endl; \ LinearSolverPCG< DIM_TO_SOLVER(p, l)::PoseMatrixType >* linearSolver = new LinearSolverPCG<DIM_TO_SOLVER(p, l)::PoseMatrixType>(); \ linearSolver->setMaxIterations(6); \ s = new DIM_TO_SOLVER(p, l)(opt, linearSolver); \ } else (void)0
Definition at line 35 of file graph_optimizer_sparse_online.cpp.
| #define DIM_TO_SOLVER | ( | p, | |
| l | |||
| ) | BlockSolver< BlockSolverTraits<p, l> > |
Definition at line 33 of file graph_optimizer_sparse_online.cpp.