#include <grasp_retriever.h>
Public Member Functions | |
| void | getGrasps (std::vector< GraspWithMetadata > &grasps) |
| PerturbationGraspRetriever (ObjectsDatabasePtr database, const household_objects_database_msgs::DatabaseModelPose &model, const std::string &arm_name) | |
| void | setGrasp (const GraspWithMetadata *gstar) |
Protected Member Functions | |
| virtual void | fetchFromDB () |
Protected Attributes | |
| std::vector < DatabasePerturbationPtr > | perturbations_ |
Private Attributes | |
| const GraspWithMetadata * | gstar_ |
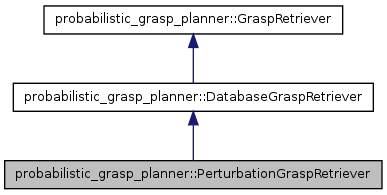
Detailed Description
Given a grasp, this gets all of the precomputed perturbations of this grasp from the database
Definition at line 168 of file grasp_retriever.h.
Constructor & Destructor Documentation
| probabilistic_grasp_planner::PerturbationGraspRetriever::PerturbationGraspRetriever | ( | ObjectsDatabasePtr | database, |
| const household_objects_database_msgs::DatabaseModelPose & | model, | ||
| const std::string & | arm_name | ||
| ) |
Definition at line 304 of file grasp_retriever.cpp.
Member Function Documentation
| void probabilistic_grasp_planner::PerturbationGraspRetriever::fetchFromDB | ( | ) | [protected, virtual] |
Reimplemented from probabilistic_grasp_planner::DatabaseGraspRetriever.
Definition at line 313 of file grasp_retriever.cpp.
| void probabilistic_grasp_planner::PerturbationGraspRetriever::getGrasps | ( | std::vector< GraspWithMetadata > & | grasps | ) | [virtual] |
Given a list of models, retrieves all of the cluster representative grasps for those models and stores them with their metadata in the grasps vector.
TODO: make this not hardcoded
TODO: check all this
TODO: add correct pose from deltas
Reimplemented from probabilistic_grasp_planner::DatabaseGraspRetriever.
Definition at line 323 of file grasp_retriever.cpp.
| void probabilistic_grasp_planner::PerturbationGraspRetriever::setGrasp | ( | const GraspWithMetadata * | gstar | ) | [inline] |
Definition at line 179 of file grasp_retriever.h.
Member Data Documentation
Definition at line 171 of file grasp_retriever.h.
std::vector<DatabasePerturbationPtr> probabilistic_grasp_planner::PerturbationGraspRetriever::perturbations_ [protected] |
Definition at line 173 of file grasp_retriever.h.
The documentation for this class was generated from the following files: