#include <mpc/types.h>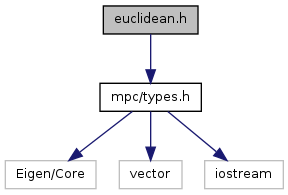
Go to the source code of this file.
Namespaces | |
| namespace | euclidean |
Typedefs | |
| typedef std::vector< VectorT > | euclidean::EuclideanObstacles |
Functions | |
| float | euclidean::cost (const VectorT &x, const VectorT &u) |
| void | euclidean::costD (const VectorT &x, const VectorT &u, Deriv &d) |
| void | euclidean::dynamics (const VectorT &x, const VectorT &u, VectorT &xNext) |
| void | euclidean::dynamicsD (const VectorT &x, const VectorT &u, Deriv &d) |
| EuclideanObstacles & | euclidean::getObstacles () |
| void | euclidean::setGoal (const VectorT &g) |
| void | euclidean::setObstacles (const EuclideanObstacles &obs) |

