#include <Eigen/Core>#include <Eigen/StdVector>#include <list>#include <vector>#include <tr1/memory>
Include dependency graph for include/utilities.h:
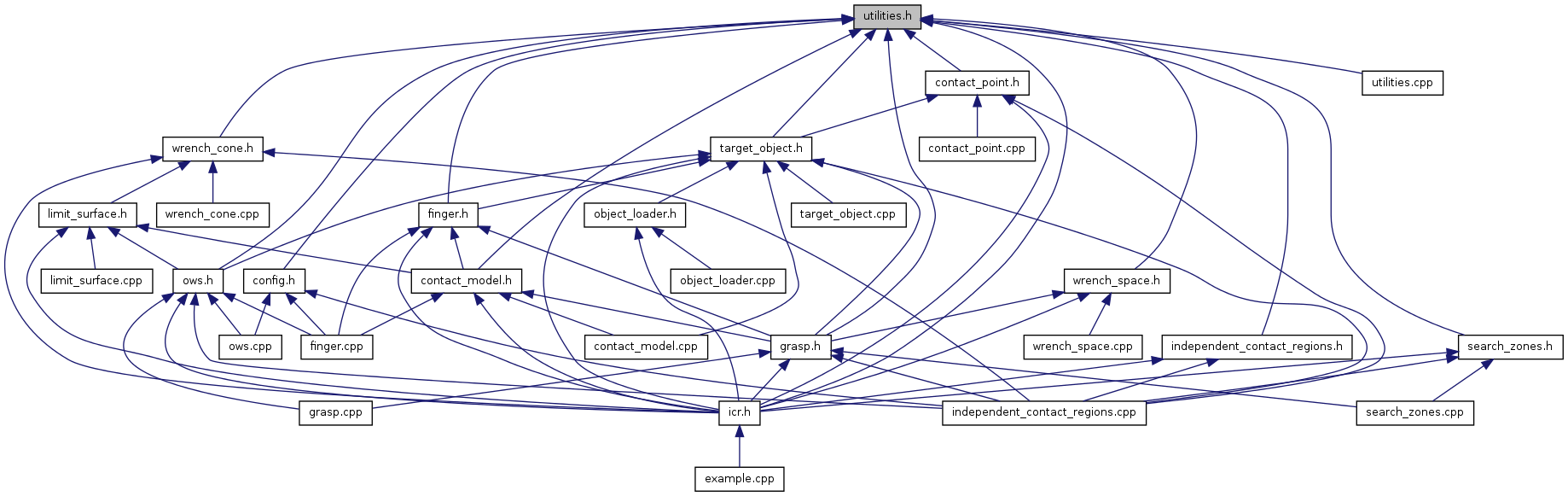
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | ICR |
Defines | |
| #define | EPSILON_FORCE_CLOSURE 1e-10 |
| #define | EPSILON_UNIT_NORMAL 1e-6 |
| #define | EPSILON_WRENCH_CONE_ROTATION 1e-10 |
| #define | EXPLORED_QUALIFIED 1 |
| #define | EXPLORED_UNQUALIFIED 2 |
| #define | NOT_EXPLORED 0 |
| #define | NOT_VISITED -1 |
| #define | PI 3.14159265358979323846264338327950 |
Typedefs | |
| typedef Eigen::Array< uint, 1, 6 > | ICR::Array6ui |
| typedef Eigen::Array< uint, Eigen::Dynamic, 6 > | ICR::ArrayX6ui |
| typedef std::list< uint > ::const_iterator | ICR::ConstIndexListIterator |
| typedef std::vector < ContactPoint * > | ICR::ContactPointList |
| typedef std::vector< Patch * > | ICR::ContactRegion |
| typedef std::vector < std::tr1::shared_ptr< Finger > > | ICR::FingerPtrList |
| typedef std::vector < FingerParameters > | ICR::FParamList |
| typedef std::tr1::shared_ptr < Grasp > | ICR::GraspPtr |
| typedef std::tr1::shared_ptr < IndependentContactRegions > | ICR::IndependentContactRegionsPtr |
| typedef std::list< uint > | ICR::IndexList |
| typedef std::list< uint >::iterator | ICR::IndexListIterator |
| typedef Eigen::Matrix< double, 6, Eigen::Dynamic > | ICR::Matrix6Xd |
| typedef Eigen::Matrix< uint, Eigen::Dynamic, 6 > | ICR::MatrixX6ui |
| typedef std::tr1::shared_ptr< OWS > | ICR::OWSPtr |
| typedef std::tr1::shared_ptr < std::vector< Patch * > > | ICR::PatchListPtr |
| typedef Eigen::Matrix< uint, 1, Eigen::Dynamic > | ICR::RowVectorXui |
| typedef std::vector < PrimitiveSearchZone * > | ICR::SearchZone |
| typedef std::tr1::shared_ptr < SearchZones > | ICR::SearchZonesPtr |
| typedef std::tr1::shared_ptr < TargetObject > | ICR::TargetObjectPtr |
| typedef unsigned int | ICR::uint |
| typedef Eigen::Matrix< double, 6, 1 > | ICR::Vector6d |
| typedef Eigen::Matrix< uint, Eigen::Dynamic, 1 > | ICR::VectorXui |
| typedef std::vector< WrenchCone * > | ICR::WrenchConeList |
Enumerations | |
| enum | ICR::ContactType { ICR::Undefined_CT = 1, ICR::Frictionless, ICR::Frictional, ICR::Soft_Finger } |
| enum | ICR::ModelType { ICR::Undefined_MT = 1, ICR::Single_Point, ICR::Multi_Point } |
| enum | ICR::RuleType { ICR::Undefined_RT = 1, ICR::Sphere } |
| enum | ICR::WrenchSpaceType { ICR::Undefined_WS = 1, ICR::Discrete, ICR::Spherical } |
Functions | |
| uint | ICR::dfactorial (uint x) |
| uint | ICR::factorial (uint x) |
| Eigen::Matrix3d | ICR::skewSymmetricMatrix (Eigen::Vector3d vector) |
Define Documentation
| #define EPSILON_FORCE_CLOSURE 1e-10 |
Definition at line 12 of file include/utilities.h.
| #define EPSILON_UNIT_NORMAL 1e-6 |
Definition at line 11 of file include/utilities.h.
| #define EPSILON_WRENCH_CONE_ROTATION 1e-10 |
Definition at line 10 of file include/utilities.h.
| #define EXPLORED_QUALIFIED 1 |
Definition at line 16 of file include/utilities.h.
| #define EXPLORED_UNQUALIFIED 2 |
Definition at line 17 of file include/utilities.h.
| #define NOT_EXPLORED 0 |
Definition at line 15 of file include/utilities.h.
| #define NOT_VISITED -1 |
Definition at line 14 of file include/utilities.h.
| #define PI 3.14159265358979323846264338327950 |
Definition at line 13 of file include/utilities.h.