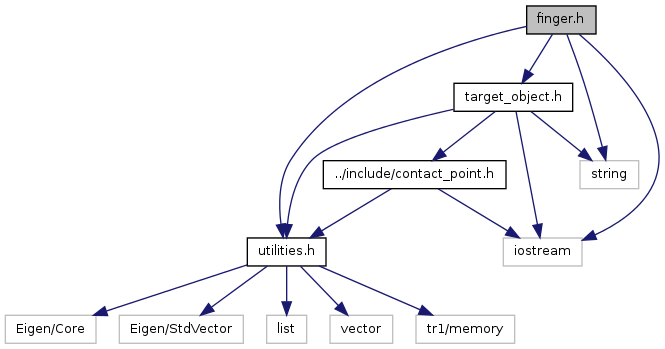
Include dependency graph for finger.h:
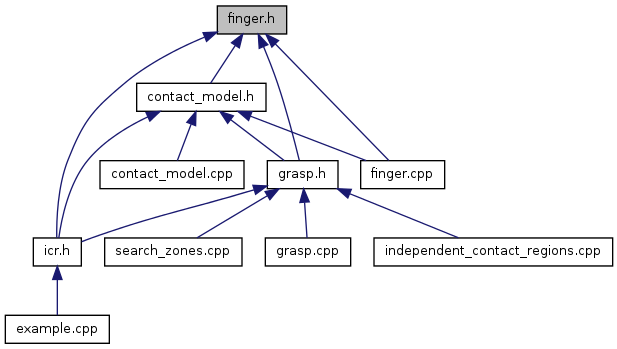
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ICR::Finger |
| Holds a ICR::ContactPoint::id_ describing where on the target object the finger is centered as well as pointers to a list of patches, an ICR::OWS and a ICR::PointContactModel. More... | |
| class | ICR::FingerParameters |
| Describes contact force magnitude, friction cone discretization, friction coefficient, torsional friction coefficient, contact type, contact model type and the patch inclusion rule for a ICR::Finger. More... | |
| struct | ICR::InclusionRule |
| Describes a volume centered on a vertex of the target object; The id's of all vertices within this volume form a patch on the target object's surface. More... | |
| struct | ICR::Node |
| A std::list<ICR::Node> acts as a FIFO list during the breadth-first computation of which points qualify for patch inclusion in ICR::Patch(uint centerpoint_id,TargetObject const& obj, InclusionRule const& rule) More... | |
| struct | ICR::Patch |
| Contains the id's of points forming a patch on the target object's surface in ICR::Patch::patch_ids_. More... | |
Namespaces | |
| namespace | ICR |