#include <string>#include <net/if.h>#include <sys/ioctl.h>#include <linux/can.h>#include "can.h"#include "comm.h"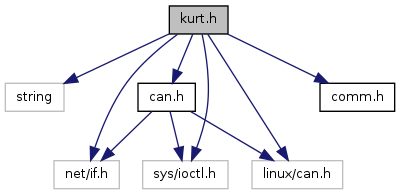
Go to the source code of this file.
Classes | |
| class | Kurt |
Defines | |
| #define | CAN_ADC00_03 0x00000005 |
| #define | CAN_ADC04_07 0x00000006 |
| #define | CAN_ADC08_11 0x00000007 |
| #define | CAN_ADC12_15 0x00000008 |
| #define | CAN_BDC00_03 0x00000015 |
| #define | CAN_BDC04_07 0x00000016 |
| #define | CAN_BDC08_11 0x00000017 |
| #define | CAN_BDC12_15 0x00000018 |
| #define | CAN_BUMPERC 0x0000000A |
| #define | CAN_CONTROL 0x00000001 |
| #define | CAN_DEADRECK 0x0000000B |
| #define | CAN_ENCODER 0x00000009 |
| #define | CAN_GETROTUNIT 0x00000010 |
| #define | CAN_GETSPEED 0x0000000C |
| #define | CAN_GYRO_MC1 0x0000000E |
| #define | CAN_GYRO_MC2 0x0000001E |
| #define | CAN_INFO_1 0x00000004 |
| #define | CAN_SETROTUNT 0x00000080 |
| #define | CAN_TILT_COMP 0x0000000D |
| #define | IR_FOV 0.074859848 |
| #define | IR_MAX 0.80 |
| #define | IR_MIN 0.10 |
| #define | MAX_V_LIST 200 |
| #define | RAW 0 |
| #define | SONAR_FOV 0.17809294 |
| #define | SONAR_MAX 1.00 |
| #define | SONAR_MIN 0.10 |
| #define | SPEED_CM 2 |
| #define CAN_ADC00_03 0x00000005 |
| #define CAN_ADC04_07 0x00000006 |
| #define CAN_ADC08_11 0x00000007 |
| #define CAN_ADC12_15 0x00000008 |
| #define CAN_BDC00_03 0x00000015 |
| #define CAN_BDC04_07 0x00000016 |
| #define CAN_BDC08_11 0x00000017 |
| #define CAN_BDC12_15 0x00000018 |
| #define CAN_BUMPERC 0x0000000A |
| #define CAN_CONTROL 0x00000001 |
| #define CAN_DEADRECK 0x0000000B |
| #define CAN_ENCODER 0x00000009 |
| #define CAN_GETROTUNIT 0x00000010 |
| #define CAN_GETSPEED 0x0000000C |
| #define CAN_GYRO_MC1 0x0000000E |
| #define CAN_GYRO_MC2 0x0000001E |
| #define CAN_INFO_1 0x00000004 |
| #define CAN_SETROTUNT 0x00000080 |
| #define CAN_TILT_COMP 0x0000000D |
| #define MAX_V_LIST 200 |

