Detailed Description
Definition at line 366 of file hokuyo_node.cpp.
Constructor & Destructor Documentation
| HokuyoNode::HokuyoNode | ( | ros::NodeHandle & | nh | ) | [inline] |
Definition at line 382 of file hokuyo_node.cpp.
Member Function Documentation
| virtual void HokuyoNode::addDiagnostics | ( | ) | [inline, virtual] |
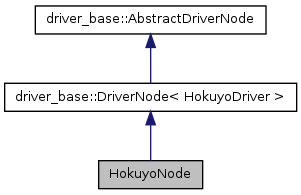
Implements driver_base::DriverNode< HokuyoDriver >.
Definition at line 444 of file hokuyo_node.cpp.
| virtual void HokuyoNode::addOpenedTests | ( | ) | [inline, virtual] |
Implements driver_base::DriverNode< HokuyoDriver >.
Definition at line 426 of file hokuyo_node.cpp.
| virtual void HokuyoNode::addRunningTests | ( | ) | [inline, virtual] |
Implements driver_base::DriverNode< HokuyoDriver >.
Definition at line 440 of file hokuyo_node.cpp.
| virtual void HokuyoNode::addStoppedTests | ( | ) | [inline, virtual] |
Implements driver_base::DriverNode< HokuyoDriver >.
Definition at line 436 of file hokuyo_node.cpp.
| void HokuyoNode::connectionStatus | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 509 of file hokuyo_node.cpp.
| void HokuyoNode::laserOffTest | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 650 of file hokuyo_node.cpp.
| void HokuyoNode::laserTest | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 554 of file hokuyo_node.cpp.
| void HokuyoNode::polledDataTest | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 562 of file hokuyo_node.cpp.
| void HokuyoNode::postOpenHook | ( | ) | [inline] |
Definition at line 410 of file hokuyo_node.cpp.
| int HokuyoNode::publishScan | ( | const hokuyo::LaserScan & | scan | ) | [inline] |
Definition at line 476 of file hokuyo_node.cpp.
| void HokuyoNode::reconfigureHook | ( | int | level | ) | [inline, virtual] |
Implements driver_base::DriverNode< HokuyoDriver >.
Definition at line 449 of file hokuyo_node.cpp.
| void HokuyoNode::statusTest | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 540 of file hokuyo_node.cpp.
| void HokuyoNode::streamedDataTest | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 581 of file hokuyo_node.cpp.
| void HokuyoNode::streamedIntensityDataTest | ( | diagnostic_updater::DiagnosticStatusWrapper & | status | ) | [inline] |
Definition at line 607 of file hokuyo_node.cpp.
Member Data Documentation
string HokuyoNode::connect_fail_ [private] |
Definition at line 369 of file hokuyo_node.cpp.
double HokuyoNode::desired_freq_ [private] |
Definition at line 371 of file hokuyo_node.cpp.
Definition at line 376 of file hokuyo_node.cpp.
ros::NodeHandle HokuyoNode::node_handle_ [private] |
Reimplemented from driver_base::DriverNode< HokuyoDriver >.
Definition at line 373 of file hokuyo_node.cpp.
sensor_msgs::LaserScan HokuyoNode::scan_msg_ [private] |
Definition at line 375 of file hokuyo_node.cpp.
diagnostic_updater::DiagnosedPublisher<sensor_msgs::LaserScan> HokuyoNode::scan_pub_ [private] |
Definition at line 374 of file hokuyo_node.cpp.
bool HokuyoNode::use_rep_117_ [private] |
Definition at line 379 of file hokuyo_node.cpp.
The documentation for this class was generated from the following file: