#include <assert.h>#include <limits>#include <iostream>#include "rotation_matrix.h"#include "quaternion.hpp"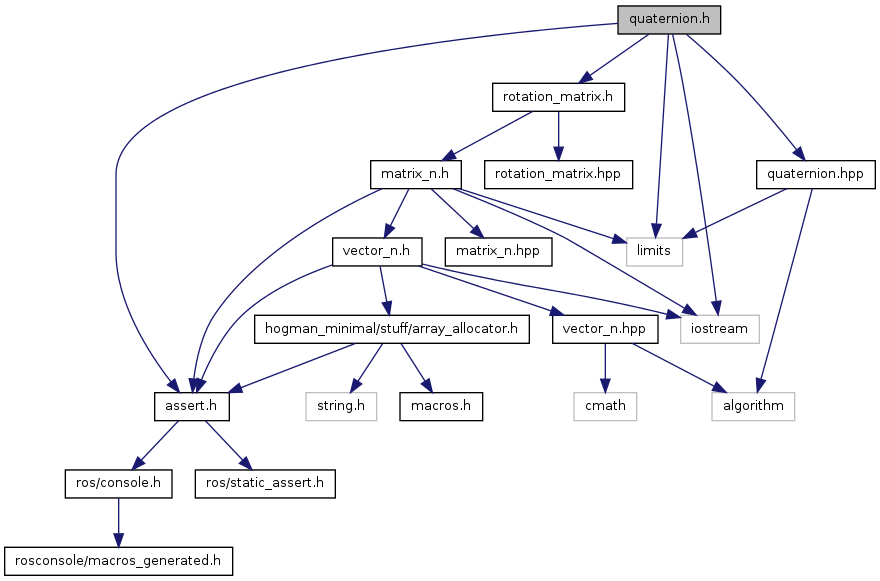

Go to the source code of this file.
Classes | |
| struct | _Quaternion< Base > |
Typedefs | |
| typedef _Quaternion< double > | Quaternion |
| typedef _Quaternion< float > | Quaternionf |

