#include <footstep_planner/helper.h>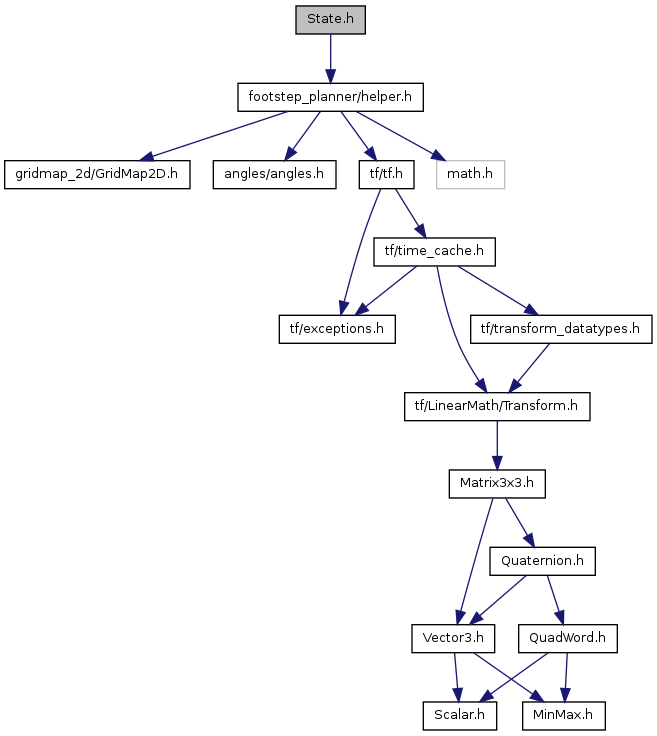
Go to the source code of this file.
Classes | |
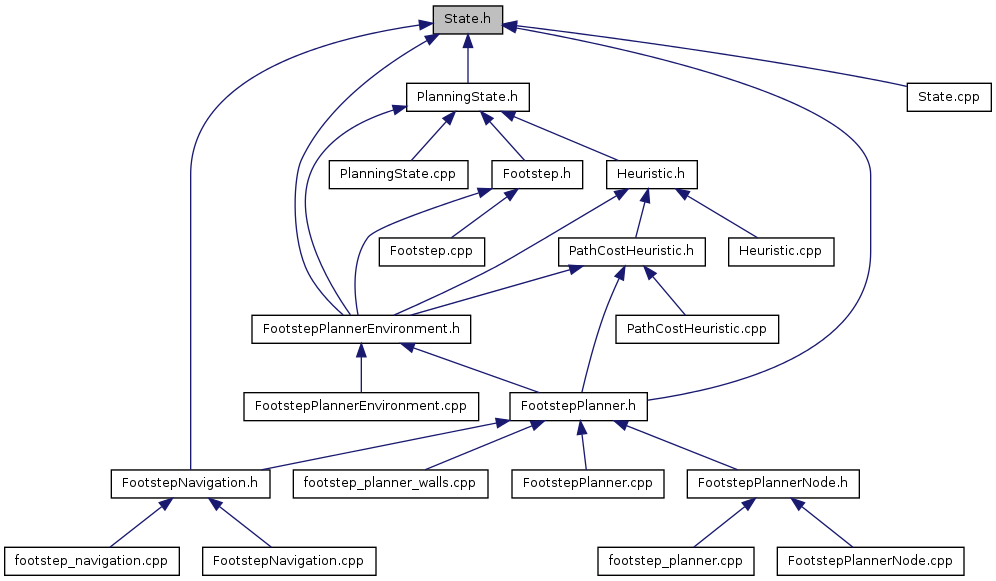
| class | footstep_planner::State |
| A class representing the robot's pose (i.e. position and orientation) in the (continuous) world view. More precisely a state points to the robot's supporting leg. More... | |
Namespaces | |
| namespace | footstep_planner |

