#include "fcl/distance_func_matrix.h"#include "fcl/collision_node.h"#include "fcl/traversal/traversal_node_setup.h"#include "fcl/narrowphase/narrowphase.h"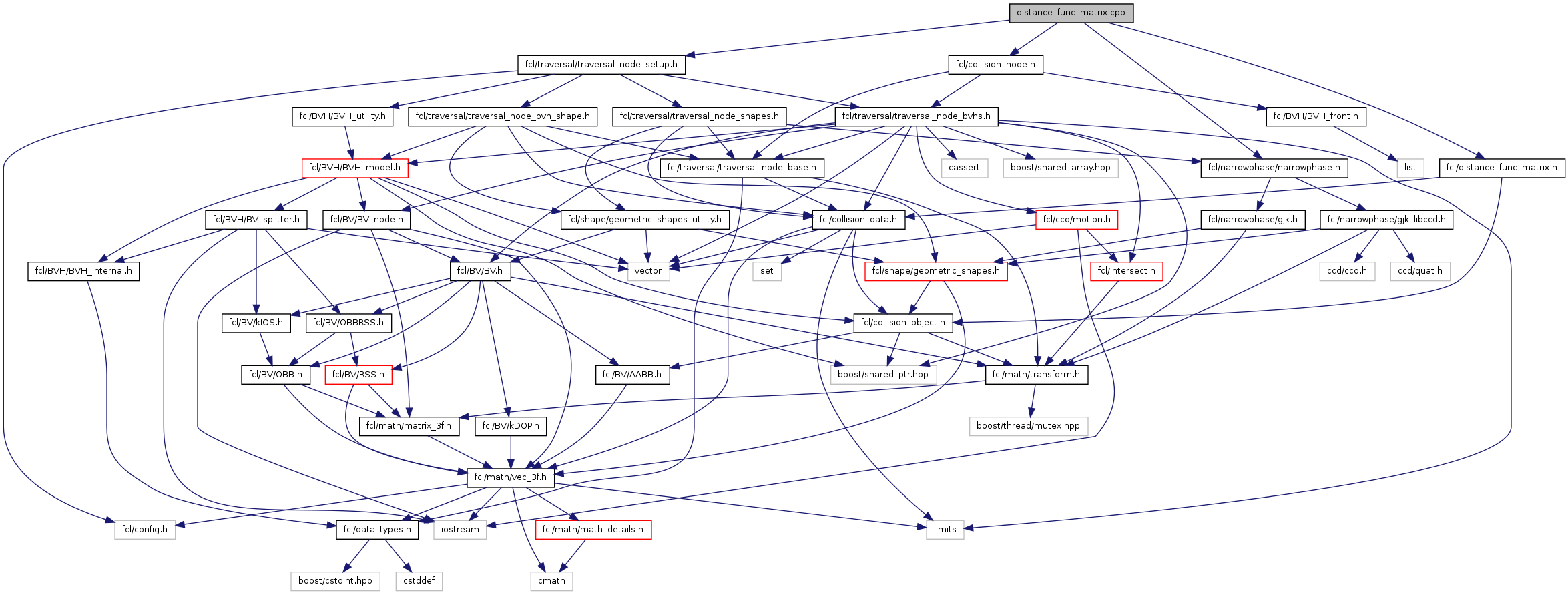
Go to the source code of this file.
Classes | |
| struct | fcl::BVHShapeDistancer< T_BVH, T_SH, NarrowPhaseSolver > |
| struct | fcl::BVHShapeDistancer< kIOS, T_SH, NarrowPhaseSolver > |
| struct | fcl::BVHShapeDistancer< OBBRSS, T_SH, NarrowPhaseSolver > |
| struct | fcl::BVHShapeDistancer< RSS, T_SH, NarrowPhaseSolver > |
Namespaces | |
| namespace | fcl |
Main namespace. | |
| namespace | fcl::details |
FCL internals. Ignore this :) unless you are God. | |
Functions | |
| template<typename T_BVH > | |
| FCL_REAL | fcl::BVHDistance (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const DistanceRequest &request, DistanceResult &result) |
| template<typename T_BVH , typename NarrowPhaseSolver > | |
| FCL_REAL | fcl::BVHDistance (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const NarrowPhaseSolver *nsolver, const DistanceRequest &request, DistanceResult &result) |
| template<> | |
| FCL_REAL | fcl::BVHDistance< kIOS > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const DistanceRequest &request, DistanceResult &result) |
| template<> | |
| FCL_REAL | fcl::BVHDistance< OBBRSS > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const DistanceRequest &request, DistanceResult &result) |
| template<> | |
| FCL_REAL | fcl::BVHDistance< RSS > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const DistanceRequest &request, DistanceResult &result) |
| template<typename OrientedMeshShapeDistanceTraversalNode , typename T_BVH , typename T_SH , typename NarrowPhaseSolver > | |
| FCL_REAL | fcl::details::orientedBVHShapeDistance (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const NarrowPhaseSolver *nsolver, const DistanceRequest &request, DistanceResult &result) |
| template<typename OrientedMeshDistanceTraversalNode , typename T_BVH > | |
| FCL_REAL | fcl::details::orientedMeshDistance (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const DistanceRequest &request, DistanceResult &result) |
| template<typename T_SH1 , typename T_SH2 , typename NarrowPhaseSolver > | |
| FCL_REAL | fcl::ShapeShapeDistance (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const NarrowPhaseSolver *nsolver, const DistanceRequest &request, DistanceResult &result) |

