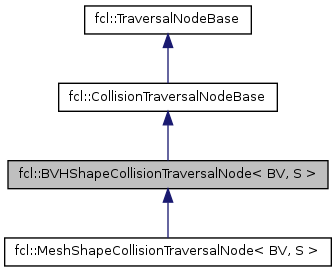
Traversal node for collision between BVH and shape. More...
#include <traversal_node_bvh_shape.h>
Public Member Functions | |
| BVHShapeCollisionTraversalNode () | |
| bool | BVTesting (int b1, int b2) const |
| BV culling test in one BVTT node. | |
| int | getFirstLeftChild (int b) const |
| Obtain the left child of BV node in the first BVH. | |
| int | getFirstRightChild (int b) const |
| Obtain the right child of BV node in the first BVH. | |
| bool | isFirstNodeLeaf (int b) const |
| Whether the BV node in the first BVH tree is leaf. | |
Public Attributes | |
| const BVHModel< BV > * | model1 |
| const S * | model2 |
| BV | model2_bv |
| int | num_bv_tests |
| int | num_leaf_tests |
| FCL_REAL | query_time_seconds |
Traversal node for collision between BVH and shape.
Definition at line 53 of file traversal_node_bvh_shape.h.
| fcl::BVHShapeCollisionTraversalNode< BV, S >::BVHShapeCollisionTraversalNode | ( | ) | [inline] |
Definition at line 56 of file traversal_node_bvh_shape.h.
| bool fcl::BVHShapeCollisionTraversalNode< BV, S >::BVTesting | ( | int | b1, |
| int | b2 | ||
| ) | const [inline, virtual] |
BV culling test in one BVTT node.
Reimplemented from fcl::CollisionTraversalNodeBase.
Reimplemented in fcl::MeshShapeCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >, fcl::MeshShapeCollisionTraversalNodekIOS< S, NarrowPhaseSolver >, fcl::MeshShapeCollisionTraversalNodeRSS< S, NarrowPhaseSolver >, and fcl::MeshShapeCollisionTraversalNodeOBB< S, NarrowPhaseSolver >.
Definition at line 85 of file traversal_node_bvh_shape.h.
| int fcl::BVHShapeCollisionTraversalNode< BV, S >::getFirstLeftChild | ( | int | b | ) | const [inline, virtual] |
Obtain the left child of BV node in the first BVH.
Reimplemented from fcl::TraversalNodeBase.
Definition at line 73 of file traversal_node_bvh_shape.h.
| int fcl::BVHShapeCollisionTraversalNode< BV, S >::getFirstRightChild | ( | int | b | ) | const [inline, virtual] |
Obtain the right child of BV node in the first BVH.
Reimplemented from fcl::TraversalNodeBase.
Definition at line 79 of file traversal_node_bvh_shape.h.
| bool fcl::BVHShapeCollisionTraversalNode< BV, S >::isFirstNodeLeaf | ( | int | b | ) | const [inline, virtual] |
Whether the BV node in the first BVH tree is leaf.
Reimplemented from fcl::TraversalNodeBase.
Definition at line 67 of file traversal_node_bvh_shape.h.
| const BVHModel<BV>* fcl::BVHShapeCollisionTraversalNode< BV, S >::model1 |
Definition at line 91 of file traversal_node_bvh_shape.h.
| const S* fcl::BVHShapeCollisionTraversalNode< BV, S >::model2 |
Definition at line 92 of file traversal_node_bvh_shape.h.
| BV fcl::BVHShapeCollisionTraversalNode< BV, S >::model2_bv |
Definition at line 93 of file traversal_node_bvh_shape.h.
int fcl::BVHShapeCollisionTraversalNode< BV, S >::num_bv_tests [mutable] |
Definition at line 95 of file traversal_node_bvh_shape.h.
int fcl::BVHShapeCollisionTraversalNode< BV, S >::num_leaf_tests [mutable] |
Definition at line 96 of file traversal_node_bvh_shape.h.
FCL_REAL fcl::BVHShapeCollisionTraversalNode< BV, S >::query_time_seconds [mutable] |
Definition at line 97 of file traversal_node_bvh_shape.h.

