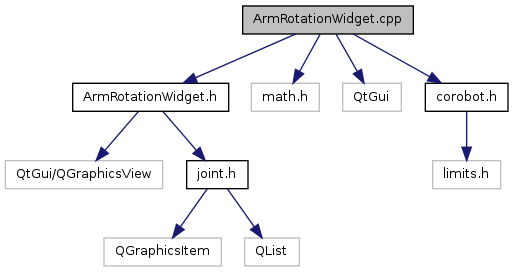
Include dependency graph for ArmRotationWidget.cpp:
Go to the source code of this file.
Variables | |
| const int | ARM_BODY_TOP = ARM_X * 7 / 10 |
| const int | ARM_CENTER_X = ARM_X / 2 |
| const int | ARM_SHOULDER_X = ARM_CENTER_X - ARM_X / 7 |
| const int | ARM_X = 120 |
| const int | ARM_Y = 120 |
| const int | LENGTH_ROBOT = 55 |
| const int | SIZE_ARM = 25 |
| const int | WIDTH_ROBOT = 40 |
Variable Documentation
| const int ARM_BODY_TOP = ARM_X * 7 / 10 |
Definition at line 52 of file ArmRotationWidget.cpp.
| const int ARM_CENTER_X = ARM_X / 2 |
Definition at line 51 of file ArmRotationWidget.cpp.
| const int ARM_SHOULDER_X = ARM_CENTER_X - ARM_X / 7 |
Definition at line 53 of file ArmRotationWidget.cpp.
| const int ARM_X = 120 |
Definition at line 49 of file ArmRotationWidget.cpp.
| const int ARM_Y = 120 |
Definition at line 50 of file ArmRotationWidget.cpp.
| const int LENGTH_ROBOT = 55 |
Definition at line 55 of file ArmRotationWidget.cpp.
| const int SIZE_ARM = 25 |
Definition at line 54 of file ArmRotationWidget.cpp.
| const int WIDTH_ROBOT = 40 |
Definition at line 56 of file ArmRotationWidget.cpp.